**Conceptos previos:** - Los **lenguajes de alto nivel**, es decir el **código**, que es entendible por los humanos (C++, Java, Python...) son textos que se tienen que traducir al lenguaje entendible por el procesador **MCU** (Micro Controler Unit). Este **lenguaje de bajo nivel** que está escrito en **binario** es difícil de entender para los humanos - El **Compilador** es un programa que **Interpreta** este texto de lenguaje de alto nivel, y lo convierte en lenguaje de bajo nivel - El Arduino Alvik se puede programar con Arduino IDE como con Micropytno, los dos son de alto nivel
Tanto Micropython como Arduino IDE son lenguajes de tipo CODIGO por lo tanto sólo se aconseja EN SECUNDARIA Cuando permita lenguaje tipo BLOQUES como Scratch, ya será adecuado para PRIMARIA
##### **¿Dónde se compila Micropython?** Como puedes ver [en este vídeo en 21:20 ](https://youtu.be/R51tf66es9w?t=1286)Python se compila **dentro del microcontrolador** es decir, dentro del ESP32. A diferencia con otros lenguajes, como el C++, el ordenador tiene el compilador, y se lo da ya en binario. [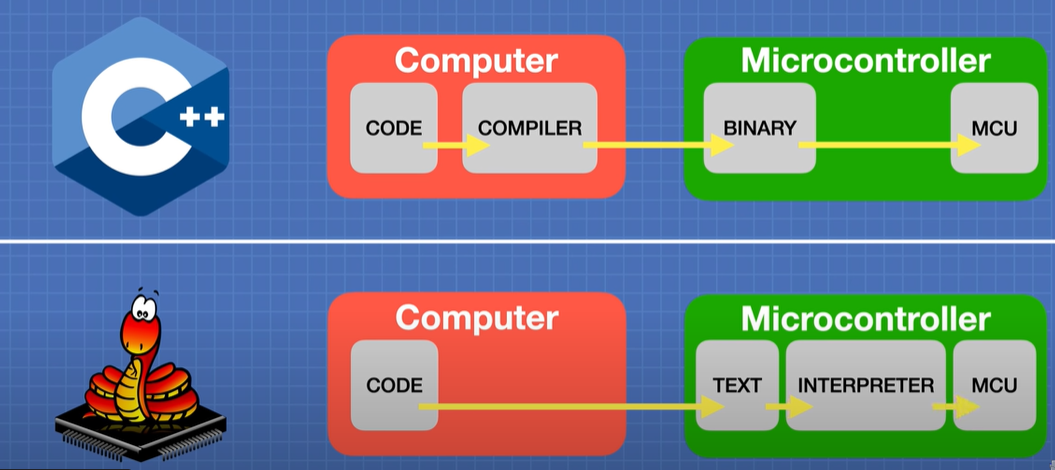](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-04-18-44-27-1-exploring-the-arduino-nano-esp32-micropython-iot-cloud-youtube.png) [Fuente vídeo Exploring the Arduino Nano ESP32 | MicroPython & IoT](https://youtu.be/R51tf66es9w?t=1512) ##### **¿Y a mi qué más me da?** Pues sí que importa....Si programas ESP32 con Arduino IDE o Arduino Cloud o con Steamakersblock (que está basado en C++) **te has cargado el compilador Python que has puesto en** ["Actualizar firmware"](https://libros.catedu.es/books/arduino-alvik/page/preparar-alvik-para-micropython-actualizar-el-firmware-de-alvik) del ESP32 luego si quieres programar en Python, tienes que volver a ["Actualizar firmware"](https://libros.catedu.es/books/arduino-alvik/page/preparar-alvik-para-micropython-actualizar-el-firmware-de-alvik) O sea, si pasas de \[ArduiIDE\] o \[Arduino Cloud\] o \[Steamakersblok\] a Micropytho **tienes que volver a instalar el compilador Micropython**
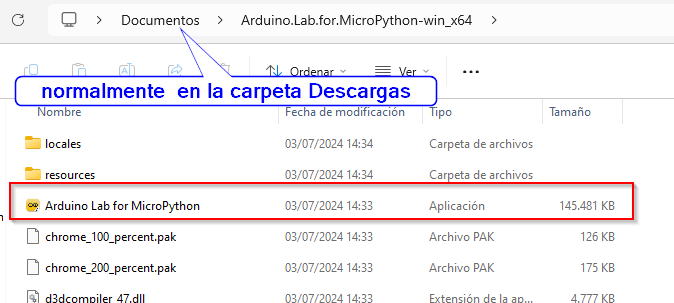
##### **¿Y con esto ya puedo crear mis programas con Micropython?** No, con esto tienes el compilador interpretador dentro del chip, pero necesitas un editor en tu PC y que se comunique con el Micropython del chip ##### **Arduino Lab for Micropython** Tal y como dice la página [https://docs.arduino.cc/micropython/](https://docs.arduino.cc/micropython/) hay dos editores para cargar MicroPython en el Arduino Alvik - **Arduino Lab for Micropython** [https://labs.arduino.cc/en/labs/micropython](https://labs.arduino.cc/en/labs/micropython) - **OpenMW** [https://openmv.io/pages/download](https://openmv.io/pages/download) Nosotros en este curso elegimos **Arduino Lab for Micropython** por su sencillez y adaptación al Arduino Alvik Tal y como dice aquí **ES UN PROGRAMA PORTABLE**, es decir, no hay que instalarlo, simplemente descomprimir y ejecutar [](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-04-09-56-30-arduino-labs.png)Ejecutamos el programa en el lugar donde lo hemos descomprimido (o donde quieras llevarte la carpeta) :
[](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-04-10-00-12-arduino-lab-for-micropython-win-x64.png){{@13342#bkmrk-%7B%7B%4012238%23bkmrk-%257b%257}}
Al ejecutar el programa, vemos: 1. Botón para conectar la placa 2. Ejecutar o para el programa 3. Gestor de fichero 4. Donde escribimos el programa 5. Ventana de estado [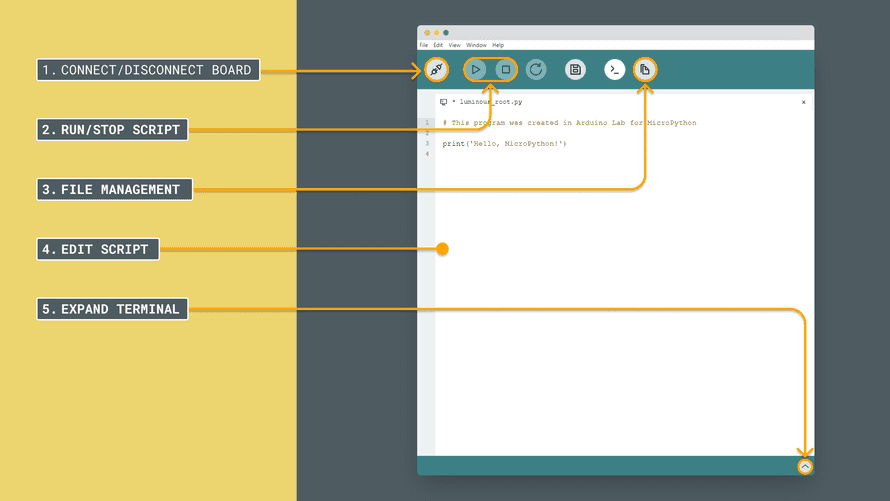](https://libros.catedu.es/uploads/images/gallery/2025-03/ideoverview.png) *Licencia CC-BYSA Fuente [https://docs.arduino.cc/micropython/environment/code-editor/](https://docs.arduino.cc/micropython/environment/code-editor/)* En el gestor de ficheros encontramos 1. **Los archivos que hay en la placa**: Puedes ver y administrar scripts o datos guardados directamente en la placa. 2. **Los archivos que hay en tu equipo**: lo que le permite seleccionar y administrar archivos para cargar o descargar. 3. D**escargar/Subir archivos**: Utiliza esta opción para transferir archivos entre su equipo y la placa. Puedea cargar nuevos scripts o descargar registros de datos de su placa. 4. **Crear archivo/carpeta:** Esta opción le permite crear nuevos archivos o carpetas directamente en la placa o en el directorio de su proyecto, lo que facilita la organización de su código y recursos. [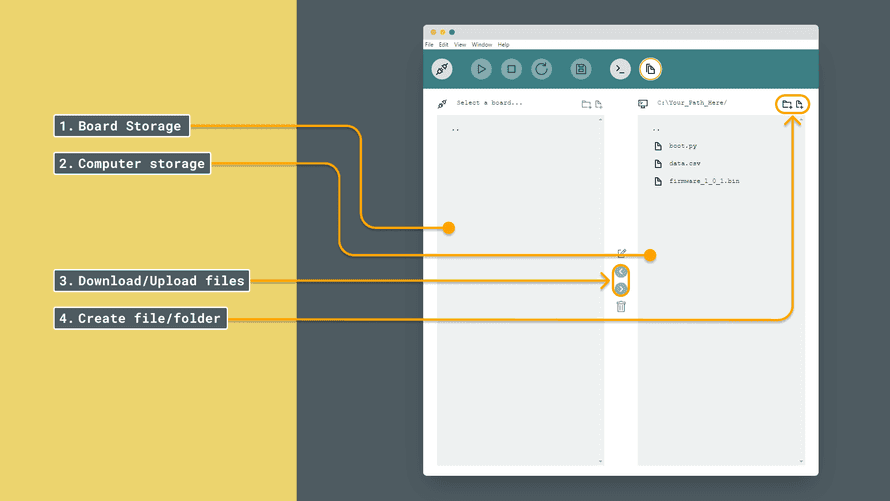](https://libros.catedu.es/uploads/images/gallery/2025-03/idefilemanager.png)*Licencia CC-BYSA Fuente [https://docs.arduino.cc/micropython/environment/code-editor/](https://docs.arduino.cc/micropython/environment/code-editor/)* # Hola mundo Vamos a comenzar con nuestro primer programa en Arduino Lab for MicroPython, el clásico Hola mundo ponemos este programa: ```python from time import sleep print("Hola mundo, soy un robot que me gusta chatear, ¿cual es tu nombre? ") student_name = input("Tu nombre : ") print("Mucho gusto , " + student_name + "! ¿ Cómo quieres llamarme?") robot_name = input("Mi nombre ? : ") print(f"{robot_name} es un fantástico nombre. Ya me siento un poco más humano.") sleep(2) # Use sleep() to make interaction feel more natural print(f"Okay, {student_name}, voy a ponerte a prueba:") sleep(2) print("¿ Has oido hablar que puedo nadar ?") sleep(4) print("Je je, es broma..... :D") sleep(5) ``` Adaptado de [https://courses.arduino.cc/explore-robotics-micropython/lessons/getting-started/](https://courses.arduino.cc/explore-robotics-micropython/lessons/getting-started/) Pulsamos a conectar, nos pregunta por el puerto [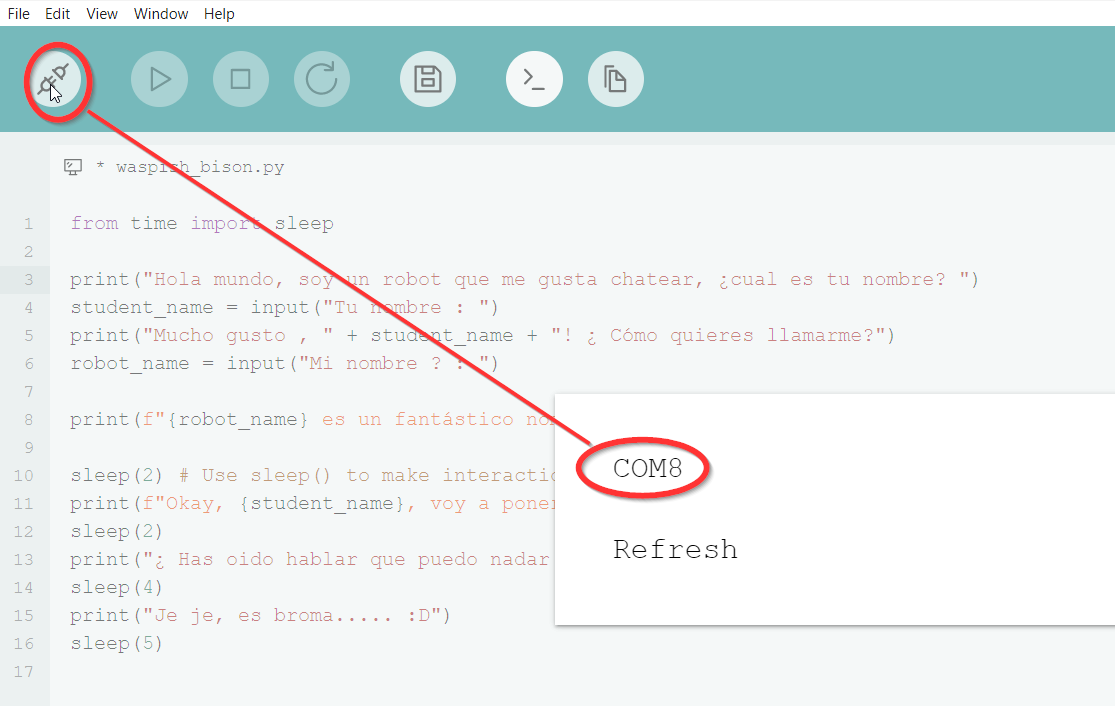](https://libros.catedu.es/uploads/images/gallery/2024-06/2024-06-14-23-20-41-arduino-lab-for-micropython.png) Runeamos y vamos contestando a sus preguntas [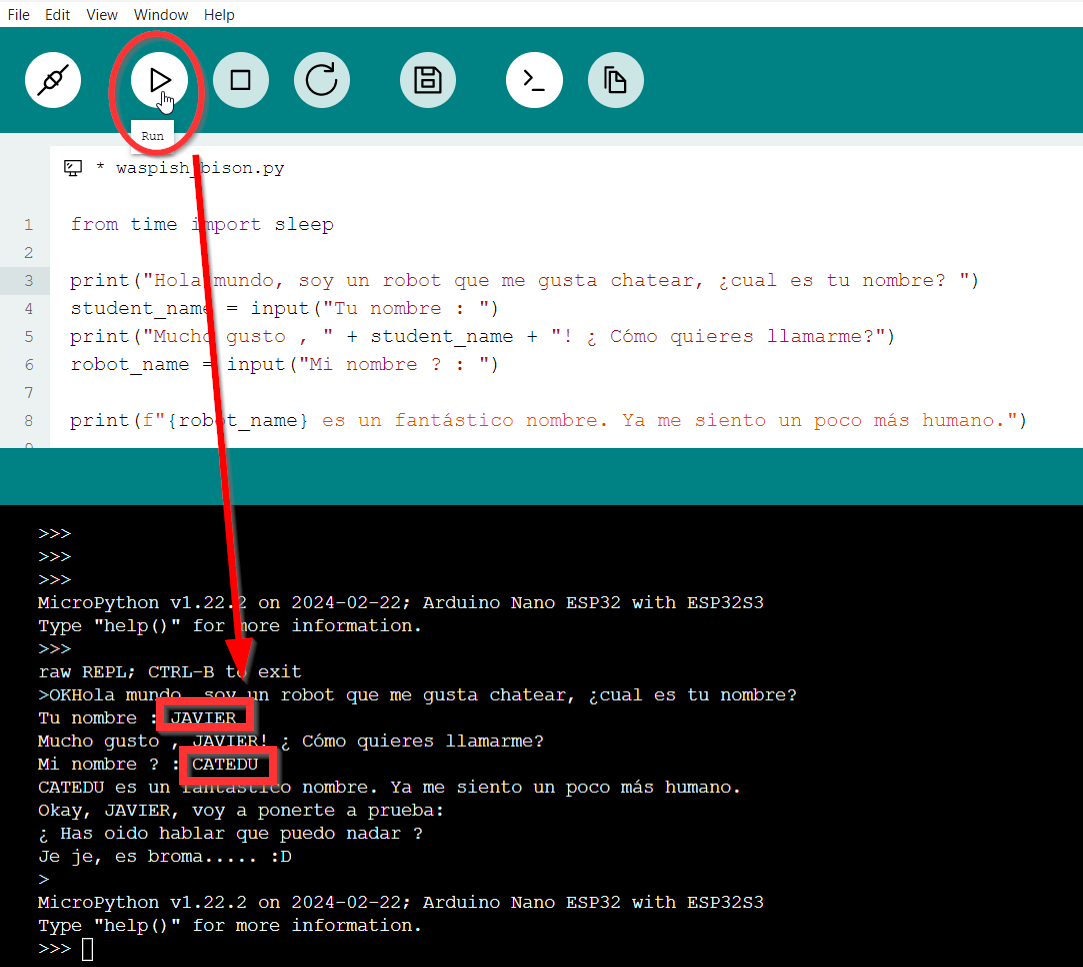](https://libros.catedu.es/uploads/images/gallery/2024-06/2024-06-14-23-22-58-arduino-lab-for-micropython.png)**ATENCIÓN** si quieres que se ejecute en el Alvik SIN necesidad de darle al "play" del programa, entonces lo tienes que grabar como main.py en el Alvik entonces se ejecuta automáticamente
# Empezando MicroPython de AlvikInspirado en el esquema del [tutorial MicroPython Basics ](https://docs.arduino.cc/micropython/basics/micropython-basics/)autora Francesca Sanfilippo & Karl Söderby
Hemos visto la función **print** visualiza un mensaje en la cónsola : ```python print('Hola mundo !') ``` Podemos introducir una **variable**, frase que contenga el texto, la función **time.sleep(**segundos) que hace una pausa, (para utilizar esta función se necesita importar la librería time con **import time** ) y dentro de un **bucle while** que se ejecuta mientras sea verdadero lo que le sigue, en este caso while True se ejecutará siempre: ```python import time frase = "Hola mundo !!" while True: print(frase) time.sleep(1) ``` Aquí se utiliza - una **función** con **def** una variable contador que en la función se declara **global** de esta manera se puede utilizar dentro de cualquier función del programa (en este caso el programa principal la funcion\_contar(). - Vemos la típica operación de cuenta contador = contador + 1 - print visualiza dos cosas, la frase y el contador ```python import time frase = "Hola mundo " contador = 0 def funcion_contar(): global contador contador = contador + 1 while True: funcion_contar() print(frase, contador) time.sleep(1) ``` El resultado: [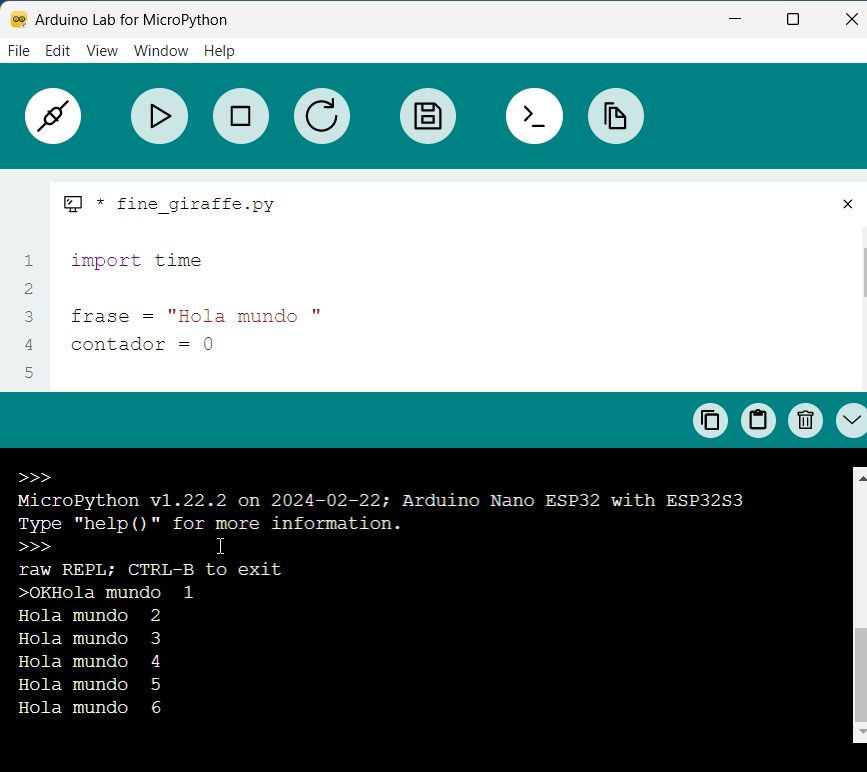](https://libros.catedu.es/uploads/images/gallery/2024-06/2024-06-15-07-32-00-arduino-lab-for-micropython.png) Aquí utilizamos el **condicional if** con su auxiliar **else** y la función **exit** para acabar el programa: ```python import time frase = "Hola mundo " contador = 0 maximo = 20 def funcion_contar(): global contador contador = contador + 1 while True: funcion_contar() if contador>20 : exit else : print(frase, contador) time.sleep(1) ``` Lo que provoca que a los 20 finalice [](https://libros.catedu.es/uploads/images/gallery/2024-06/2024-06-15-07-44-37-arduino-lab-for-micropython.png) Podemos usar en vez de variables numéricas, variables tipo **array** para los bucles : ```python Catedu = ['Javier', 'Santiago', 'Silvia', 'Berta', 'Cristina', 'Nacho', 'Arturo', 'Chefo', 'Vladi', 'Ruben', 'Pablo', 'JuanFran'] def printCatedus(): for persona in Catedu: print(persona) printCatedus() ``` [](https://libros.catedu.es/uploads/images/gallery/2024-06/2024-06-15-07-51-00-arduino-lab-for-micropython.png) Con esto ya podemos avanzar, pero si quieres[ ](https://drive.google.com/file/d/1pUxzeBBbpskfIHHtlH68zrOPEIFKR_vE/view?usp=sharing) # Introducción al Python {{@12327}} # Arduino Alvik APIEstas instrucciones son específicas del ARDUINO ALVIK
Para acceder a las funciones de Arduino Alvik API tenemos que ejecutar las instrucciones: ```python alvik = ArduinoAlvik() alvik.begin() ``` Entonces ya podemos usar las siguientes: (extraido de [https://docs.arduino.cc/tutorials/alvik/api-overview/](https://docs.arduino.cc/tutorials/alvik/api-overview/) )Luego veremos en el apartado de programación del Arduino Alvik con código Arduino IDE que utilizaremos una biblioteca #include "Arduino\_Alvik.h" que importa prácticamente las mismas funciones, ver [https://libros.catedu.es/books/arduino-alvik/page/programas-arduino-ide-sin-iot](https://libros.catedu.es/books/arduino-alvik/page/arduino-ide-sin-iot-un-pequena-danza)
| **FUNCION con sus Inputs** | **Outputs** |
| stop() | para todas las funciones Alvik |
| is\_on() | true si esta encendido false si esta apagado |
| is\_target\_reached() | true si ha enviado M o R en el mensaje |
| get\_ack() | last\_ack: el valor del último mensaje |
| stop() | para todas las funciones Alvik |
| get\_orientation() | r: valor de balanceo p: valor de cabeceo y: valor de guiñada |
| get\_accelerations() ver uso en [https://libros.catedu.es/books/arduino-alvik/page/programas-de-ejemplo](https://libros.catedu.es/books/arduino-alvik/page/programas-de-test) | ax ay az |
| get\_gyros() ver uso en [https://libros.catedu.es/books/arduino-alvik/page/programas-de-ejemplo](https://libros.catedu.es/books/arduino-alvik/page/programas-de-test) | gx by gz |
| get\_imu() | las 6 anteriores |
| get\_line\_sensors() | left center right |
| brake() | Frena el robot |
| get\_battery\_charge() | battery\_soc: el % de la batería |
| get\_touch\_any() | touch\_any es true si se ha apretado cualquier botón |
| get\_touch\_ok() get\_touch\_cancel() get\_touch\_center() get\_touch\_up() get\_touch\_left() get\_touch\_down() get\_touch\_right() | touch\_ok es true si se ha apretado ok etc... ver ejemplos en [https://libros.catedu.es/books/arduino-alvik/page/robotica-para-infantil](https://libros.catedu.es/books/arduino-alvik/page/robotica-para-infantil) y en [https://libros.catedu.es/books/arduino-alvik/page/mensajes-a-telegram](https://libros.catedu.es/books/arduino-alvik/page/mensajes-a-telegram) |
| get\_color\_raw() get\_color\_label() | color |
| get\_version() print\_status() | versión del firmware para actualizarlo ver [https://docs.arduino.cc/tutorials/alvik/user-manual/#how-to-upload-firmware](https://docs.arduino.cc/tutorials/alvik/user-manual/#how-to-upload-firmware) |
| set\_behaviour(behaviour: int) | |
| rotate(angle: float, unit: str = 'deg', blocking: bool = True) | |
| move(distance: float, unit: str = 'cm', blocking: bool = True) | |
| get\_wheels\_speed(unit: str = 'rpm') | left\_wheel\_speed: the speed value right\_wheel\_speed: the speed value |
| set\_wheels\_speed(left\_speed: float, right\_speed: float, unit: str = 'rpm') | |
| set\_wheels\_position(left\_angle: float, right\_angle: float, unit: str = 'deg') | |
| get\_wheels\_position(unit: str = 'deg') | angular\_velocity |
| drive(linear\_velocity: float, angular\_velocity: float, linear\_unit: str = 'cm/s',angular\_unit: str = 'deg/s') | |
| get\_drive\_speed(linear\_unit: str = 'cm/s', angular\_unit: str = 'deg/s') | linear\_velocity: speed of the robot. angular\_velocity: speed of the wheels. |
| reset\_pose(x: float, y: float, theta: float, distance\_unit: str = 'cm', angle\_unit: str = 'deg') | |
| get\_pose(distance\_unit: str = 'cm', angle\_unit: str = 'deg') | x y theta |
| set\_servo\_positions(a\_position: int, b\_position: int) | |
| set\_builtin\_led(value: bool) | |
| set\_illuminator(value: bool) | |
| color\_calibration(background: str = 'white') | |
| rgb2hsv(r: float, g: float, b: float) | h: hue value s: saturation value v: brightness value |
| get\_color(color\_format: str = 'rgb') | r or h g or s b or v |
| hsv2label(h, s, v) | color label: like "BLACK" or "GREEN", if possible, otherwise return "UNDEFINED" |
| get\_distance(unit: str = 'cm') | lee la distancia del sensor TOF: ver ejemplo en [https://libros.catedu.es/books/arduino-alvik/page/evita-obstaculos](https://libros.catedu.es/books/arduino-alvik/page/evita-obstaculos) left\_tof: 45° to the left object distance center\_left\_tof: 22° to the left object distance center\_tof: center object distance center\_right\_tof: 22° to the right object distance right\_tof: 45° to the right object distance |
| get\_distance\_top(unit: str = 'cm') | top\_tof: 45° to the top object distance |
| get\_distance\_bottom(unit: str = 'cm') | bottom\_tof: 45° to the bottom object distance |
| on\_touch\_ok\_pressed(callback: callable, args: tuple = ()) on\_touch\_cancel\_pressed(callback: callable, args: tuple = ()) on\_touch\_center\_pressed(callback: callable, args: tuple = ()) on\_touch\_up\_pressed(callback: callable, args: tuple = ()) on\_touch\_left\_pressed(callback: callable, args: tuple = ()) on\_touch\_down\_pressed(callback: callable, args: tuple = ()) on\_touch\_right\_pressed(callback: callable, args: tuple = ()) | He intentado hacer programas con estas instrucciones, pero una vez pulsado la tecla, sigue llamando a callback continuamente No veo su utilidad teniendo get\_touch |
¿Qué es eso de **bloking**? Por ejemplo en rotate(angle: float, unit: str = 'deg', blocking: bool = True) Si es true, todos los eventos no influyen, es decir el microprocesador esta centrado en esa instrucción Si es falso, el microprocesador es libre de hacer otra cosa a la vez Utiliza true si quieres precisión o no quieres que nada interaccione con la acción que estas ejecutando