**Elige la opción que quieras, las dos son válidas**
## **Conocimientos previos** Para la parte de programación en bloques, **ES NECESARIO QUE SEPAS LOS CONCEPTOS BÁSICOS DE SCRATCH**: [Scratch](https://libros.catedu.es/books/ensena-pensamiento-computacional-con-scratch) Para la parte de programación en código **ES NECESARIO QUE SEPAS LOS COMANDOS BÁSICOS DE : [Código Arduino](https://libros.catedu.es/books/programa-arduino-mediante-codigo)**[.](https://libros.catedu.es/books/programa-arduino-mediante-codigo) No obstante, si no lo tienes reciente, te recordaremos lo esencial.  [Vector de fondo creado por macrovector - www.freepik.es](https://www.freepik.es/fotos-vectores-gratis/fondo) # Pensamiento computacional Como se puede ver en esta hoja de ruta, esta propuesta de **DOMOTICA CON ARUINO** es una propuesta barata, y muy flexible pues se puede trabajar con lenguaje gráfico como con código Guía orientativaTenemos un **grupo Telegram Robótica Educativa en Aragón**, [https://t.me/roboticaeducativaaragon](https://t.me/roboticaeducativaaragon)
 # Robótica y accesibilidad #### **1.- Introducción** Durante mucho tiempo la robótica fue patrimonio de personas y/o instituciones con alta capacidad económica (podían adquirir las placas con microcontroladores comerciales) y capacidad intelectual (podían entender y programar el funcionamiento de las mismas) siempre dentro de los límites establecidos por las marcas comerciales y lo que pudieran “desvelar” de su funcionamiento, vigilando siempre que la competencia no “robara” sus secretos y “copiara” sus soluciones. Todo esto saltó por los aires en torno a 2005 con la irrupción de un grupo de profesores y estudiantes jóvenes, que decidieron romper con esta dinámica, tratando de poner a disposición de su alumnado microcontroladores económicamente accesibles y que les permitieran conocer su funcionamiento, sus componentes, e incluso replicarlos y mejorarlos. Nacía **Arduino** y el concepto de **Hardware Open Source**. Detrás de este concepto se encuentra la **accesibilidad universal.** En un proyecto Open Source todo el mundo puede venir, ayudar y contribuir, minimizando barreras económicas e intelectuales. Arduino traslada al hardware un concepto ya muy conocido en el ámbito del software, como es el **software open source o software libre.** **[](https://libros.catedu.es/uploads/images/gallery/2022-12/opensource.png)**Uno de los objetivos de la Micro:bit Educational Foundation es llegar a 100 millones de escolares en todo el mundo.
En correspondencia con las líneas de acción y con los principios expuestos, el sistema resultante es muy económico: tanto las placas como los accesorios producidos por terceras empresas tienen un precio muy contenido. Además, dado el carácter abierto del proyecto, están disponibles algunos clones totalmente compatibles, como Elecrow Mbits o bpi:bit. Estos clones son incluso más potentes y económicos que la placa original. El universo micro:bit destaca por su **alta integración de software y hardware**: basta un clic de ratón para cargar las librerías necesarias para que funcione cualquier complemento robótico, como sensores, pantallas, tarjetas de Internet de las Cosas, robots, casas domóticas, etc. La programación de la placa se realiza desde un ordenador a través de un navegador cualquiera, estando disponibles **12 lenguajes de programación**. De nuevo, por ser un sistema abierto, existen múltiples soluciones de programación, aunque las más común es [MakeCode](https://makecode.microbit.org/). [](https://libros.catedu.es/uploads/images/gallery/2023-03/makecode.png)*Captura de pantalla del editor MakeCode, [https://makecode.microbit.org/#](https://makecode.microbit.org/).* El sitio web MakeCode permite programar con bloques y también en Python y en Java, traduciendo de un lenguaje a otro instantáneamente. No se necesita ningún registro en la plataforma para poder programar. Los programas también pueden guardarse descargados en el ordenador compilados en código de máquina. Al subir de nuevo el programa al editor, se realiza una decompilación automática al lenguaje de bloques, Python o Java. Los programas guardados en código de máquina se pueden cargar directamente en micro:bit, que en el escritorio de un ordenador se maneja como una simple unidad de memoria USB. MakeCode contiene además múltiples recursos como tutoriales, vídeos, fichas de programación, cursos para el profesorado, ejemplos y propuestas de proyectos y experimentos, todo ello en varios idiomas y clasificado por edades desde los 7 años. Otra solución muy usada para programar micro:bit es [MicroPython](https://python.microbit.org/v/3), creada por Python Software Foundation, otra organización sin ánimo de lucro. [MicroCode](https://microsoft.github.io/microcode/#H4sIACVEGGQAAwEAAP//AAAAAAAAAAA=) permite que los más pequeños, a partir de los 6 años de edad, programen micro:bit mediante un sistema de fichas dispuestas en líneas de acción. Están disponibles un tutorial introductorio en 20 idiomas, una guía del usuario y muchos ejemplos. El proyecto es de código abierto. Micro:bit también es programable en **Scratch** con sólo añadir una extensión al editor. Todos los entornos de desarrollo descritos disponen de un simulador de micro:bit, por lo que ni siquiera resulta necesario disponer de una tarjeta física para aprender a programar. Una vez realizada la programación, la placa y sus complementos pueden funcionar desconectados del ordenador por medio de un cargador de móvil, una batería externa o un simple par de pilas alcalinas.| COMPONENTE | CONEXIÓN EN EL ARDUINO |
| LDR | A0 |
| EJE X JOYSTICK | A1 |
| EJE Y JOYSTICK | A2 |
| SWITH JOYSTICK | A3 |
| PULSADOR ALARMA | A4 |
| PULSADOR TACTIL | D2 |
| BUZZER ACTIVO | D3 |
| SERVO | D4 |
| RGB AZUL | D5 |
| RGB ROJO | D6 |
| RGB VERDE | D7 |
| SENSOR AGUA | D8 |
| SENSOR LLAMA | D9 |
| LASER | D10 |
| TX DE BLUETOOTH | D11 |
| RX DE BLUETOOTH | D12 |
| LED VERDE | D13 |
| SENSOR ULTRASONIDOS TRH | D12 |
| SENSOR ULTRASONIDOS ECHO | D13 |
{{@7552#bkmrk-en-vivo-%C2%BFqu%C3%A9-es-eso%3F}}
# Métodos para interactuar los objetos y el robot (dispositivo) Si queremos que nuestro robot se pueda comunicar con el objeto o objetos que tenga mBlock, antes con mBlock 3.0 la comunicación era inmediata, fíjate en este script de una alarma: [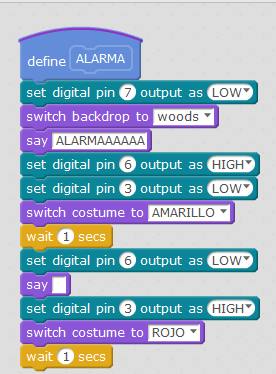](https://libros.catedu.es/uploads/images/gallery/2022-02/embedded-image-xgeexnug.jpeg) Mezcla en el mismo script: - órdenes específicas de la placa arduino (set digital...) - órdenes específicas del objeto que exista en mBlock (por defecto el oso panda) say .... switch costume to .... - órdenes del fondo switch backdrop to ... Con mBlock 5.0 **YA NO SE PUEDE**, pero tenemos unos trucos ## **MÉTODO UTILIZAR VARIABLES GLOBALES** Se pueden crear variables, en cualquier objeto, y las lee cualquier objeto,**Este método se utiliza con la opción EN VIVO**
[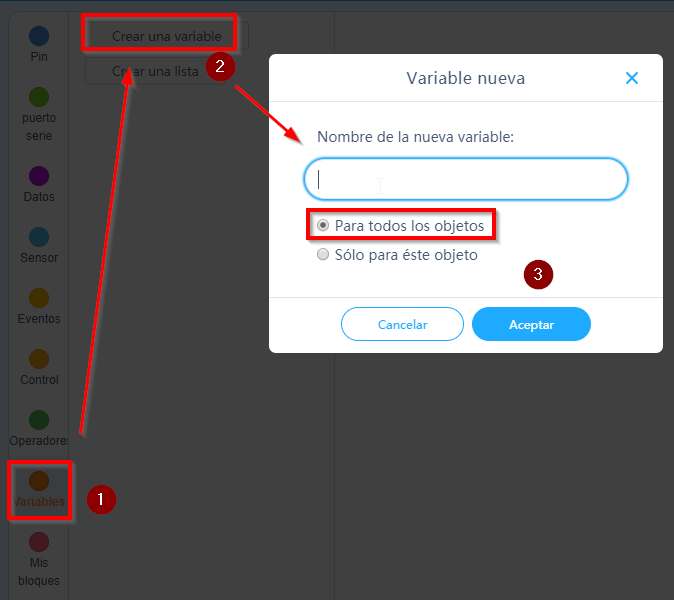](https://libros.catedu.es/uploads/images/gallery/2023-12/variablesglobales.jpg) De esta manera si creamos una variable **frase** para todos los objetos: [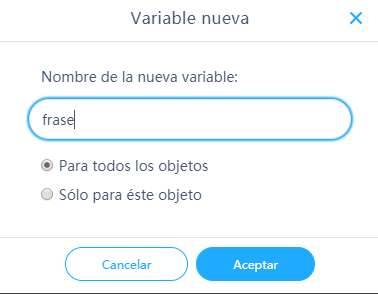](https://libros.catedu.es/uploads/images/gallery/2023-09/frase3.jpg) Podemos usarla en el robot [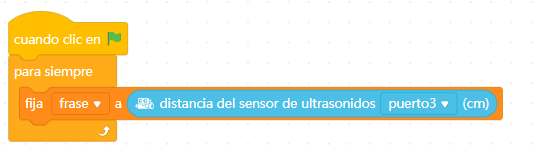](https://libros.catedu.es/uploads/images/gallery/2023-12/frase1.jpg) y el programa del objeto que queramos, en este caso el oso panda lo puede visualizar [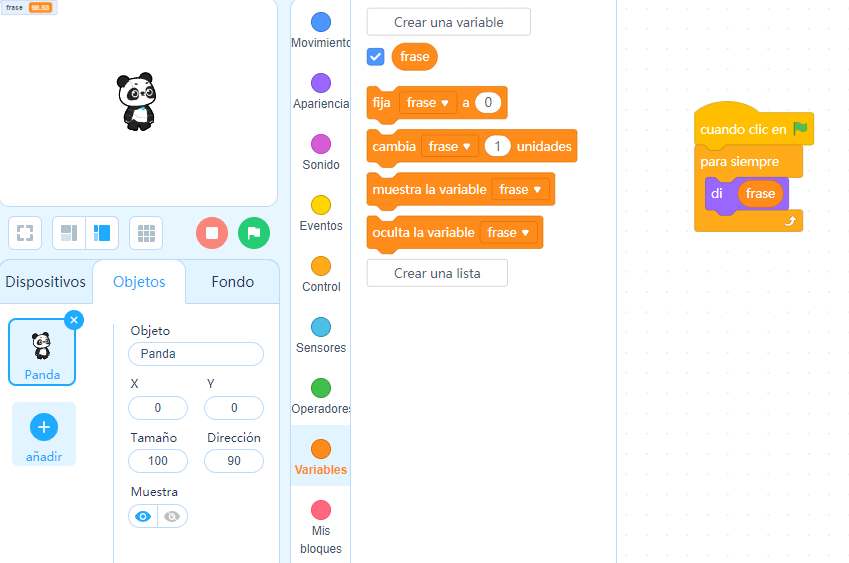](https://libros.catedu.es/uploads/images/gallery/2023-12/frase2.jpg) ## **MÉTODO UTILIZAR MENSAJES** Cualquier objeto tiene a su disposición enviar mensajes a los otros**Este método se utiliza con la opción EN VIVO**
[](https://libros.catedu.es/uploads/images/gallery/2023-12/mensajes.jpg) ## **MÉTODO EXTENSIÓN BROADCAST = TRANSMITIR MENSAJES****Este método se utiliza con la opción EN CARGA**
Es parecido al anterior, hay que ir al + que hay abajo para instalar extensiones [](https://libros.catedu.es/uploads/images/gallery/2023-12/arduino-pelotahinchadistancia3.png) Buscar la extensión "Broadcast" e instalarla [](https://libros.catedu.es/uploads/images/gallery/2023-12/broadcast.jpg) Se instala primero descargándola con el + aquí [](https://libros.catedu.es/uploads/images/gallery/2023-12/broadcast1.png) Y luego añadir una vez descargada [](https://libros.catedu.es/uploads/images/gallery/2023-12/broadcast2.png) Entonces aparecen unas nuevas instrucciones [](https://libros.catedu.es/uploads/images/gallery/2023-12/broadcast3.png) y se instalan unas instrucciones extras parecidas a las anteriores pero más potentes - En el mismo mensaje podemos transmitir valores asociados - Funciona **EN MODO CARGA** - Esto es muy útil pues hay instrucciones que sólo se pueden utilizar en modo CARGA, de esta manera podemos pasar valores de la placa electrónica a los objetos del ordenador (oso panda o lo que sea) simplemente teniendo conectado la placa con el ordenador.El resto de objetos trabajan en modo vivo, es decir, si cambias un bloque, automáticamente se ven los efectos
A lo otros objetos TAMBIÉN hay que instalar la extensión BROADCAST
**DESVENTAJA** no se pueden transmitir mensajes de objetos a la placa. Sólo de la placa a los objetos
# Preparando mBlock y Arduino Hay que hacer dos cosas - Cuando te descargas **mBlock** por defecto está preparado para utilizarlo con los robots (mBot), hay que decirle que no vamos a conectar un robot, que la placa será **Arduino UNO** - Nuestro **ARDUINO** no pueden entender mBlock por lo que hay que grabarle un software dentro (un software que se graba en una placa hardware se llama **FIRMWARE**, no se borra cuando se apaga) y este firmware entiende lo que le manda mBlock, es decir, si conectamos otro Arduino y no le hemos grabado el firmware, no entenderá a mBlock. Lo mejor un tutorial muy breve: # INTERRUPTOR CREPUSCULAR ## **Conocimientos previos** #### **SENSOR DE LUZ LDR** El LDR es una resistencia que varía su valor con la luz, cuanto más OSCURO más grande es su valor, por lo tanto por la ley de Ohm V= I\*R este módulo nos da una señal analógica (voltios) que aumenta con la oscuridad. Para saber más del LDR te recomendamos [esta página de Luis Llamas.](https://www.luisllamas.es/medir-nivel-luz-con-arduino-y-fotoresistencia-ldr/) Los valores analógicos en el Arduino van desde 0 a 1023, luego hay que elegir un valor umbral, el cual, a partir de ese valor es un valor digital 1 o un 0, nosotros hemos elegido 500. Por hardware puedes regular el potenciómetro que tiene el módulo para que produzca el cambio cuando lo desees: 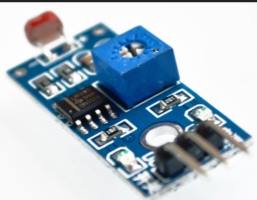 #### **MODULO LED RGB** Este módulo tiene 4 pines que podemos proporcionar valores analógicos desde 0V a 5V para conseguir diferentes colores: Pines B = Blue G = Green R = Red (-) = GND 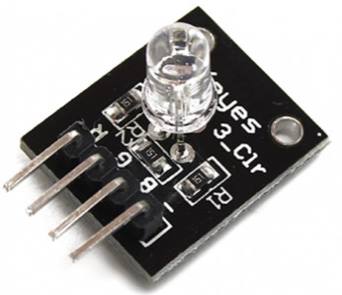Recuerda que Arduino tiene entradas digitales, entradas analógicas, salidas digitales, **pero no tiene salidas analógicas.** En vez de ello tiene salidas PWM ¿Qué no sabes lo que es? 🤔 eso es porque te has saltado un capítulo anterior.
De momento conectaremos el pin G (Green) a una salida digital normal (pin 7), luego sólo se puede encender o apagar. Más adelante usaremos los colores Blue y Red a salidas PWM En [esta página](https://tkkrlab.nl/wiki/Arduino_KY-016_3-color_LED_module) puedes encontrar más detalles de este módulo y un ejemplo curioso de utilización sin cables. ### **RETO** - Cuando el sensor LDR detecte oscuridad - El led RGB se enciende verde - Cambiamos a fondo tipo "noche" - En caso contrario - el led RGB está apagado - el fondo es día ##### **Solución esquema** - El módulo LDR lo conectamos al pin analógico A0 - El LED RGB lo conectamos - Pin 5 digital - Blue - Pin 6 digital - Red - Pin 7 digital - Green 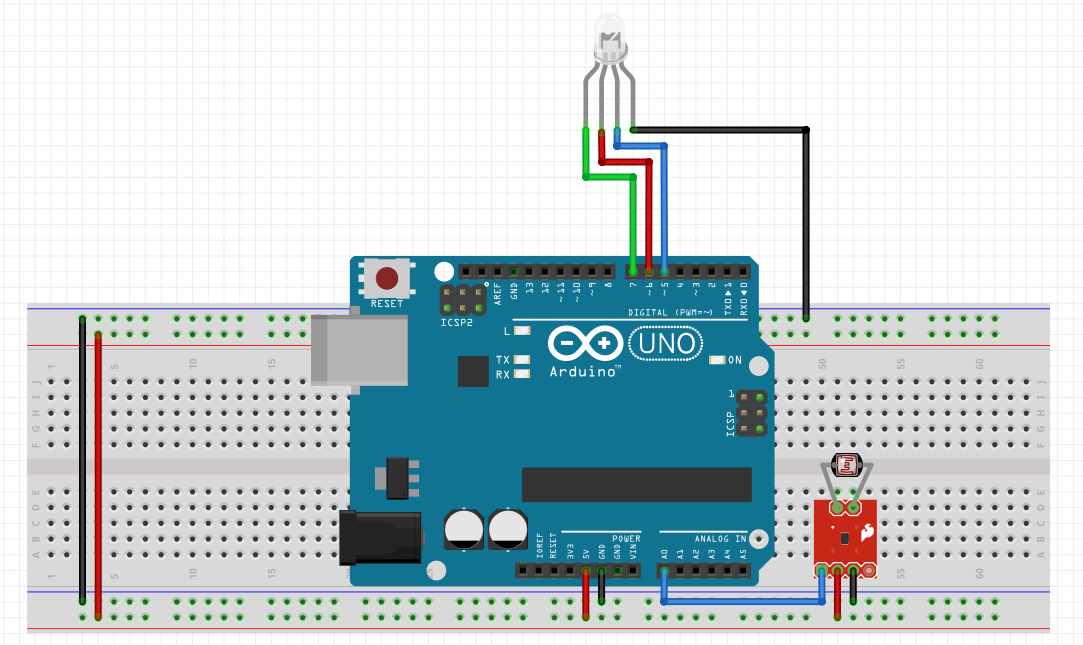 ##### **Solución Video** ##### **Solución programa** El programa lo tienes aquí [https://planet.mblock.cc/project/3255351](https://planet.mblock.cc/project/3255351) Utilizaremos la técnica variables globales [https://libros.catedu.es/books/domotica-con-arduino/page/programacion-mblock](https://libros.catedu.es/books/domotica-con-arduino/page/dos-formas-de-programar-en-mblock) **Objeto placa arduino** Nota: el pin digital 3 bajo es por si tienes puesto el buzzer, para que no suene, lo veremos más adelante. [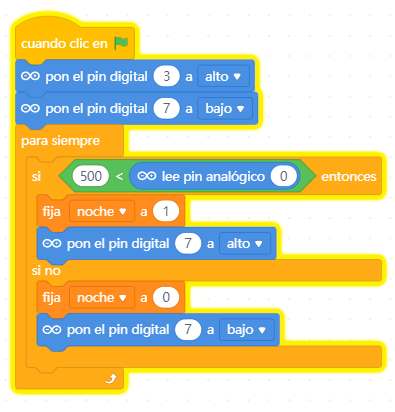](https://libros.catedu.es/uploads/images/gallery/2023-12/interruptor-crepuscular1.jpg) **Objeto panda** [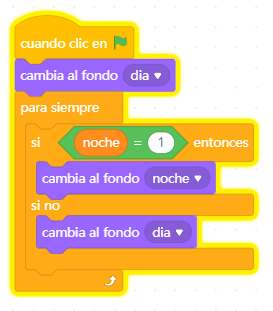](https://libros.catedu.es/uploads/images/gallery/2023-12/interruptor-crepuscular2.jpg) # APERTURA PUERTA ### **Conocimientos previos** ##### **SERVOMOTORES** Visita [esta página](https://libros.catedu.es/books/programa-arduino-mediante-codigo/page/control-de-servomotores) para que veas dos vídeos y entiendas la diferencia entre: - *Servos convencionales* - Servos de rotación contínua [](https://libros.catedu.es/uploads/images/gallery/2023-11/servo.jpg) Tranquilo, que el servo que nos interesa es un **servo convencional** donde simplemente se fija el ángulo con la instrucción en mBlock  Si quieres saber más sobre servos te aconsejamos visitar [esta página de Luis Llamas.](https://www.luisllamas.es/controlar-un-servo-con-arduino/) #### **INTERRUPTOR** **TÁCTIL**  No tiene mucho misterio: detecta una acumulación de carga y dispara un pulso positivo. Si quieres saber más mira [esta página de Luis Llamas.](https://www.luisllamas.es/interruptor-touchless-con-arduino-y-sensor-capacitivo/) ##### **BUZZER ACTIVO**  La diferencia con el pasivo es que no es necesario enviarle pulsos para que emita una frecuencia, sólo tenemos que dar la orden y él reproduce un tono. **Ojo que funciona con lógica negativa** es decir: - *si queremos que **suene** tenemos que enviar un **LOW**.* - si queremos que **no suene** tenemos que enviar un **HIGH** Si quieres saber más de este componente visita [esta página](https://www.luisllamas.es/arduino-buzzer-activo/) ### **RETO** Cuando se pulse el interruptor táctil .... - Se abre la puerta - Al cabo de 5 segundos, tiempo suficiente para entrar - Se avisa que la puerta se va a cerrar con 3 pulsos buzzer y cambiando el color el sprite del Panda de mBlock - Se cierra la puerta (sería como una llave táctil) ##### **Solución esquema** - pin 2 digital: El interruptor táctil touchless. - pin 3 digital: El buzzer activo. - pin 4 digital: Servo de la puerta. 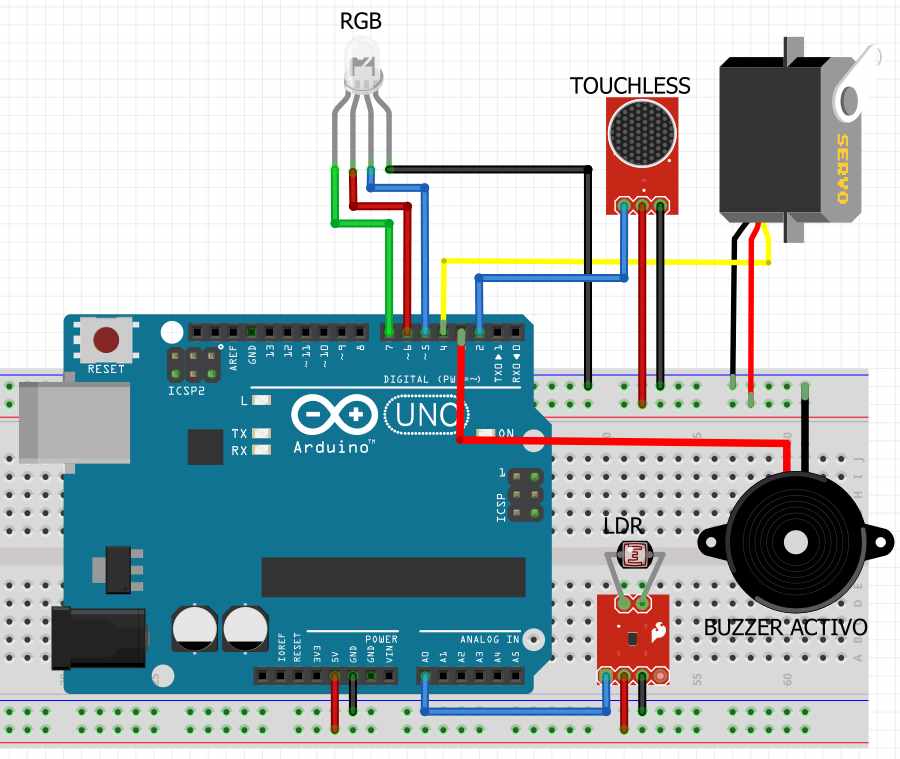 ##### **Solución Video** ##### **Solución programa** El programa lo tienes aquí [https://planet.mblock.cc/project/3251877](https://planet.mblock.cc/project/3251877) Se utiliza la técnica de envío de mensajes [https://libros.catedu.es/books/domotica-con-arduino/page/programacion-mblock](https://libros.catedu.es/books/domotica-con-arduino/page/dos-formas-de-programar-en-mblock) **El dispositivo ARDUINO** [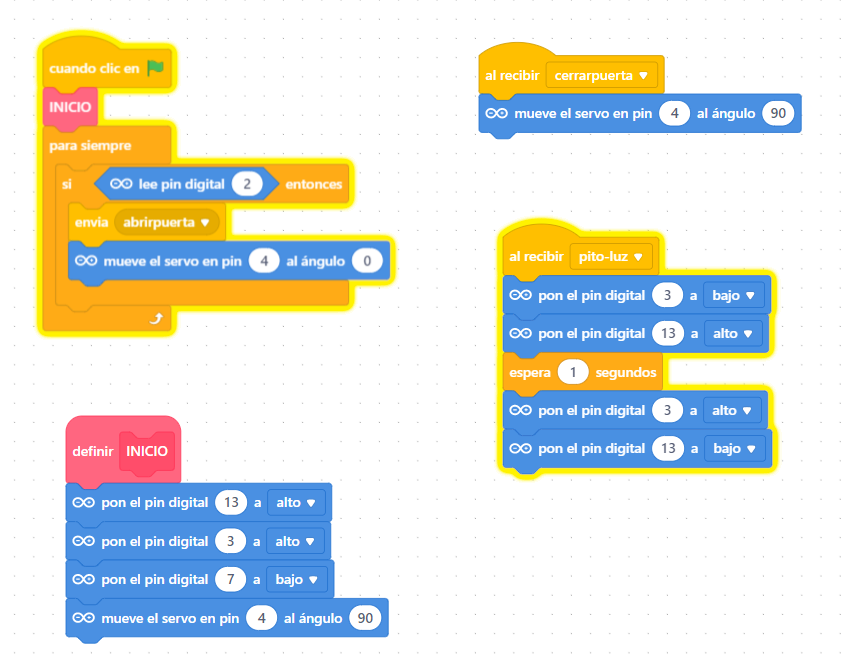](https://libros.catedu.es/uploads/images/gallery/2023-12/8zKdomotica-aperturapuerta1.png) **El objeto OSO PANDA** [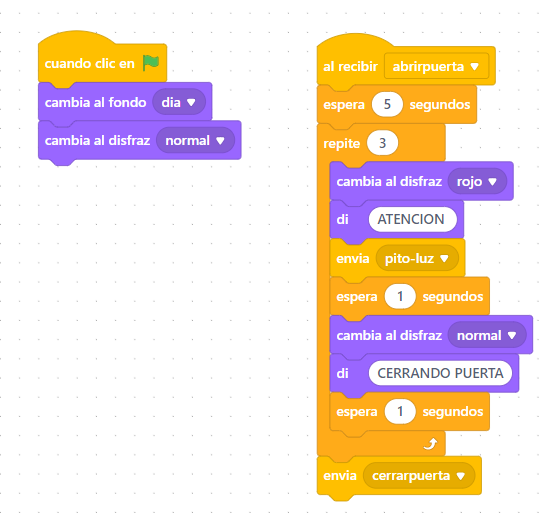](https://libros.catedu.es/uploads/images/gallery/2023-12/nbzdomotica-aperturapuerta2.png) El objeto **puerta** tiene este sencillo programa: [](https://libros.catedu.es/uploads/images/gallery/2023-12/domotica-aperturapuerta3.png) # ALARMA AGUA ### **Conocimientos previos** ##### **SENSOR DE AGUA**  Es un sensor muy sencillo: Al mojar los conductores, aumenta la conductibilidad y se traduce en una salida HIGH en su pin de salida **S**. Si quieres saber más de este sensor visita [esta página de Luis Llamas.](https://aprendiendoarduino.wordpress.com/2018/10/17/sensor-deteccion-de-agua-para-arduino/) Con sólo tener los dedos húmedos ya lo detecta. Hay que tener en cuenta que sólo queremos detectar AGUA o NO AGUA, o sea digital. Hay otros sensores de humedad que están indicados para medir la humedad del suelo, (tienen forma de dos pinchos para clavarlos) en estos casos que queremos medir la cantidad de humedad la señal es más precisa y analógica. [Ver](https://www.luisllamas.es/arduino-humedad-suelo-fc-28/) ### **RETO** Si detecto agua : Aviso de agua en el fondo y en el objeto Panda y cierro la puerta pues entra el agua de la lluvia con el mismo procedimiento que en apartado anterior. ##### **Solución esquema** - Pin D8 : Sensor de agua El esquema el sensor de agua es uno de humedad, pero no había otro en Fritzing 😳 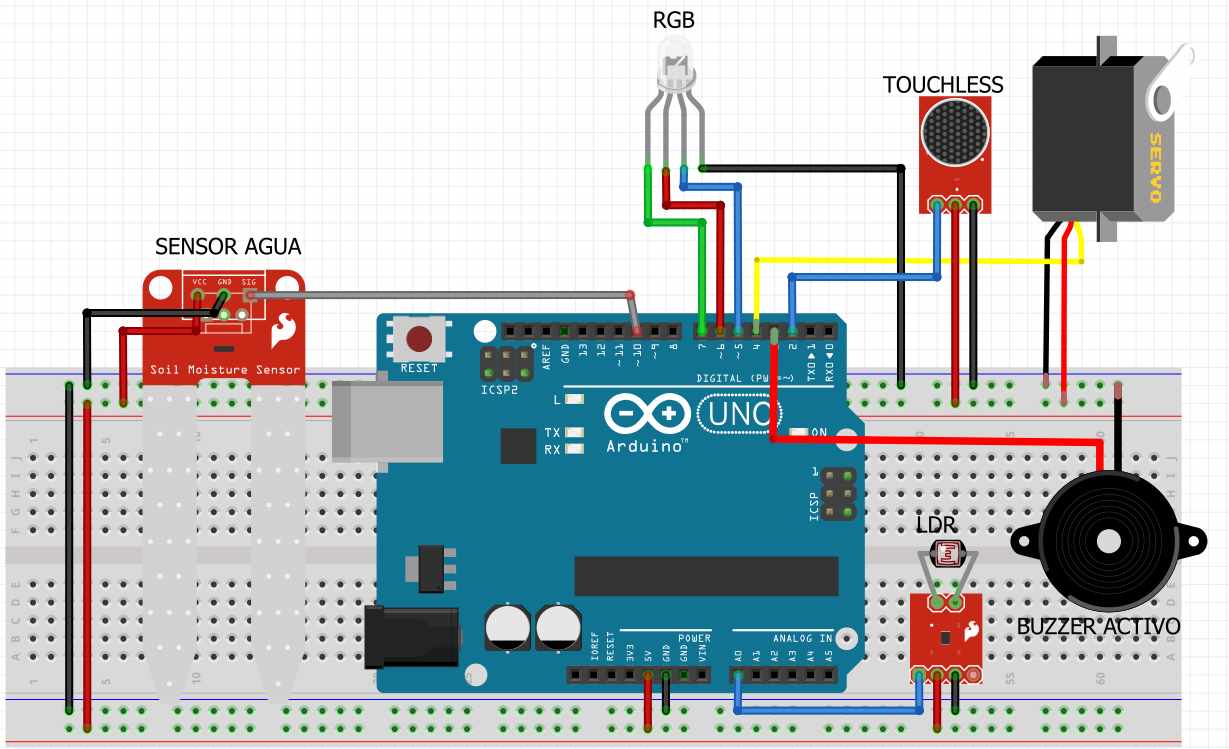 ##### **Solución Vídeo** **Solución programa** El programa lo tienes aquí [https://planet.mblock.cc/project/3255438](https://planet.mblock.cc/project/3255438) Se utiliza la técnica de variables globales [https://libros.catedu.es/books/domotica-con-arduino/page/programacion-mblock](https://libros.catedu.es/books/domotica-con-arduino/page/dos-formas-de-programar-en-mblock) Dispositivo ARDUINO [](https://libros.catedu.es/uploads/images/gallery/2023-12/domotica-agua1.png) Objeto Oso panda [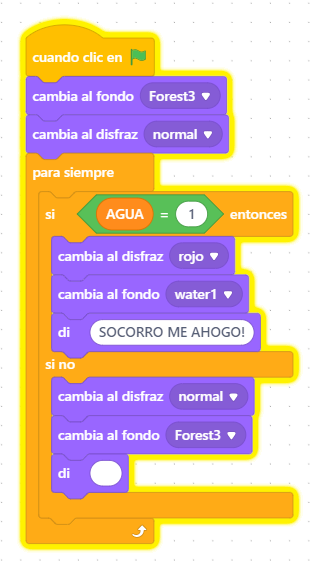](https://libros.catedu.es/uploads/images/gallery/2023-12/domotica-agua2.png) # JOYSTICK ### **Conocimientos previos** ##### **JOYISTICK** Yo no sé qué tiene este componente que llama la atención a los chavales  Así que vamos a aprovecharlo: Tiene 2 potenciómetros según los ejes X e Y y un interruptor central. Las dos primeras salidas son analógicas, el *microruptor (cuando presionas el joystick)* lo trataremos también analógico, pues nos faltarán entradas y salidas digitales cuando lleguemos al final y queramos poner un Bluetooth. Si quieres saber más de este componente visita [esta página. de Luis LLamas](https://www.luisllamas.es/arduino-joystick/) **SALIDAS PWM** Como Arduino no tiene valores de salida analógicos, utilizaremos los pines PWM (~) para simular tensiones variables de salida. De esta manera la luz Roja y Azul serán variables pudiendo crear el ambiente que queramos.**¿No sabes lo que es PWM (~)?** eso es que no te has leído los capítulos anteriores 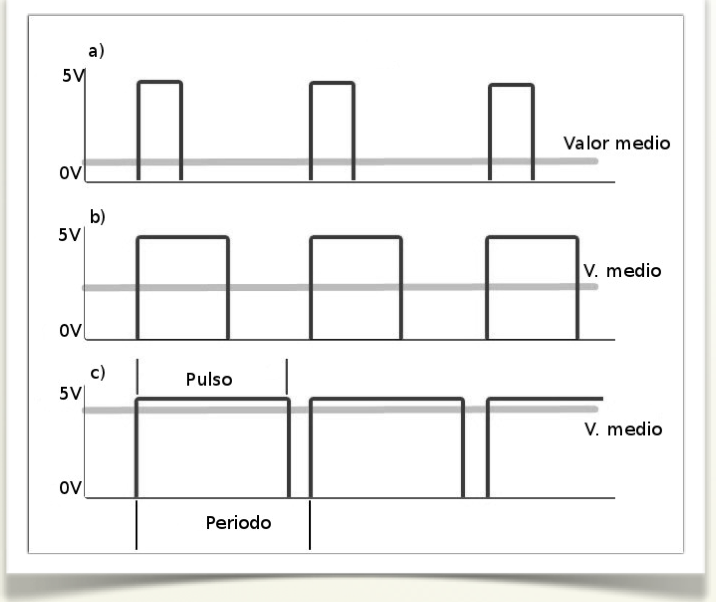
### **RETO** - Si muevo en el eje X el Joystick la luz RGB se enciende AZUL proporcionalmente a la inclinación del mando Joystick. - Si muevo en el eje Y el Joystick la luz RGB se enciende ROJO proporcionalmente a la inclinación del mando Joystick. - Si pulso el Switch central - Si la puerta estaba cerrada la abre - Si la puerta estaba abierta, la cierra, con los avisos correspondientes. - Además vamos a complicar el reto Y TIENE QUE INCLUIR - Lo visto en interruptor crepuscular: - Si es luz<500 se hace de noche, tanto en el fondo com el oso panda - se enciende la luz verde del led RGB - Lo visto en la apertura y cierre de la puerta con el sensor táctil exterior - - si se pulsa el sensor táctil exterior, se abre la puerta, tanto la real, como la del objeto - se mantiene abierta durante 5 segundos - avisa que va a cerrar la puerta con tres avisos, el led13 parpadeando y el objeto avisando - se cierra la puerta, tanto la real como la del objeto - Lo visto en alarma agua, pero modificado - si hay agua objeto gotera aparece y suena pitido ##### **Solución esquema** Al ser un componente analógico lo conectaremos en las entradas analógicas: \* La salida eje X que gradúa la luz azul en A1 \* La salida eje Y que gradúa la luz roja en A2 \* La salida Switch central en A3 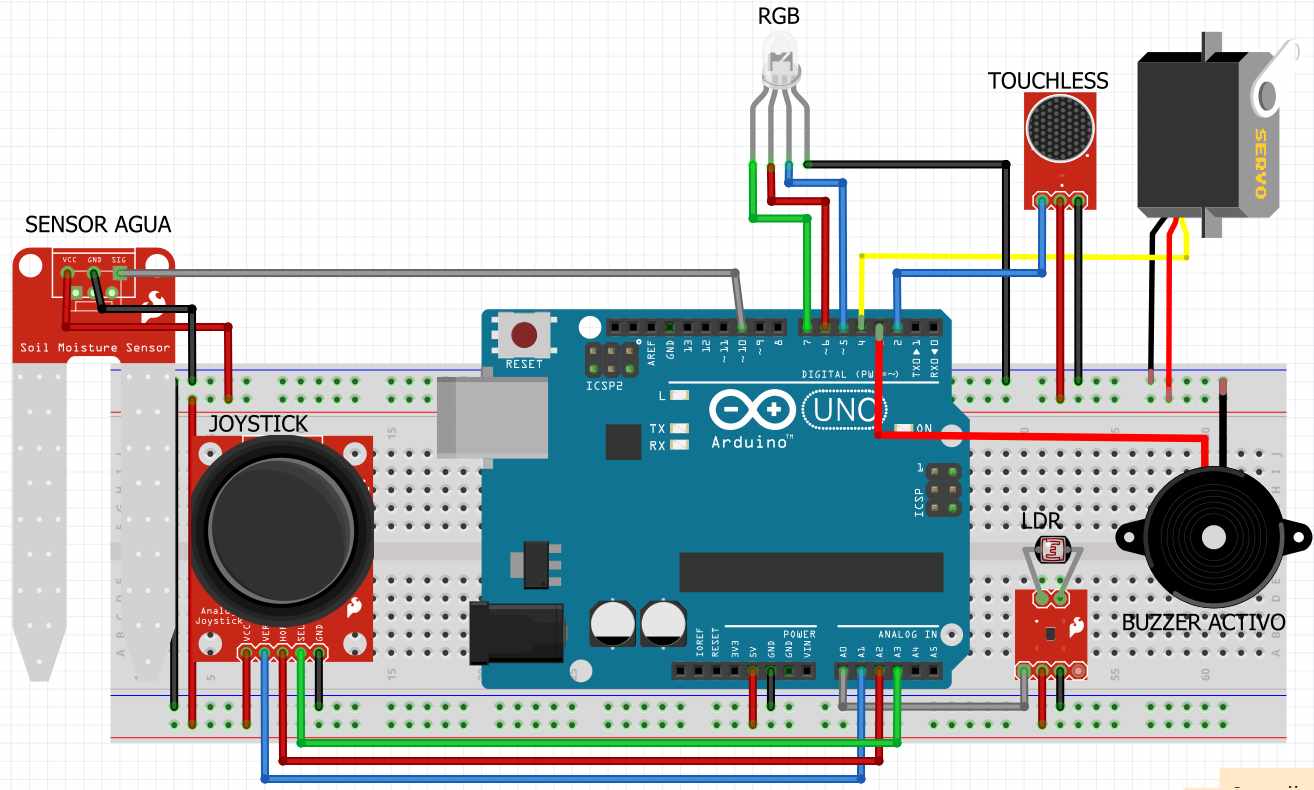 ##### **Solución vídeo** ##### **Solución esquema** El programa lo tienes aquí [https://planet.mblock.cc/project/3255492](https://planet.mblock.cc/project/3255492) Se ha utilizado el truco DE ENVIOS MENSAJES BROADCAS ver [https://libros.catedu.es/books/domotica-con-arduino/page/programacion-mblock](https://libros.catedu.es/books/domotica-con-arduino/page/dos-formas-de-programar-en-mblock)Elegimos esta opción pues el programa es muy complejo para ejecutarlo EN VIVO es mejor cargar, y que la placa Arduino envíe los mensajes correspondientes. Si se realiza EN VIVO da problemas
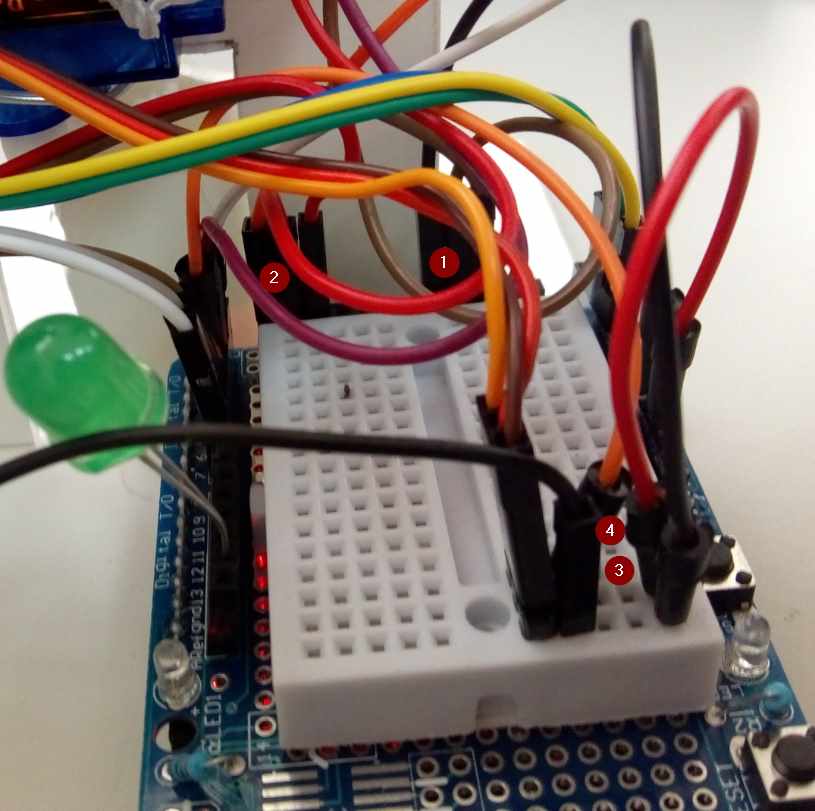
Para ir simplificando se ha utilizado la creación de bloques, y cada mensaje que envía la placa Arduino lo recogerá un objeto **DISPOSITIVO ARDUINO** Ejecuta siempre los 4 bloques [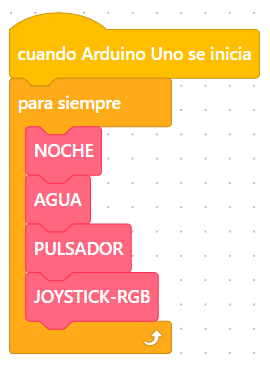](https://libros.catedu.es/uploads/images/gallery/2023-12/cd3domotica-joystick1.png) Bloque NOCHE [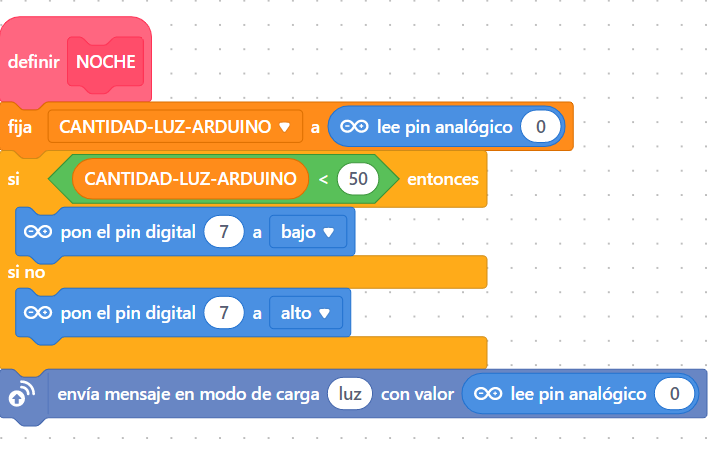](https://libros.catedu.es/uploads/images/gallery/2023-12/domotica-joystick2.png) Bloque AGUA [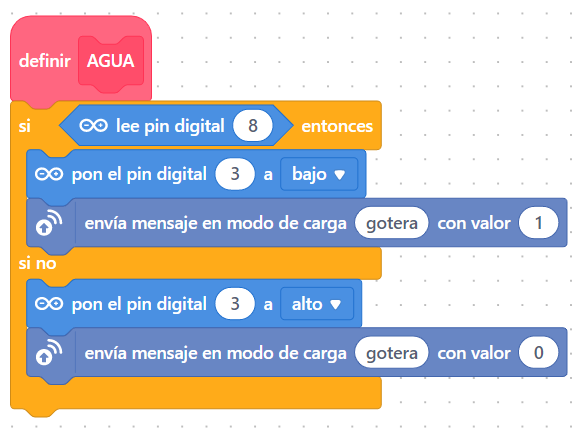](https://libros.catedu.es/uploads/images/gallery/2023-12/domotica-joystick3.png) Bloque PULSADOR [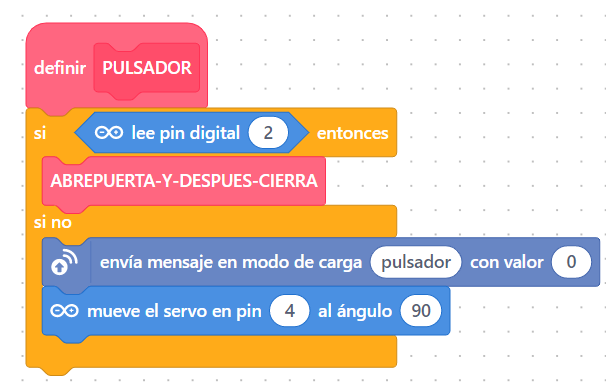](https://libros.catedu.es/uploads/images/gallery/2023-12/domotica-joystick4.png) Bloque ABERPUERTA-Y-DESPUESICERRA [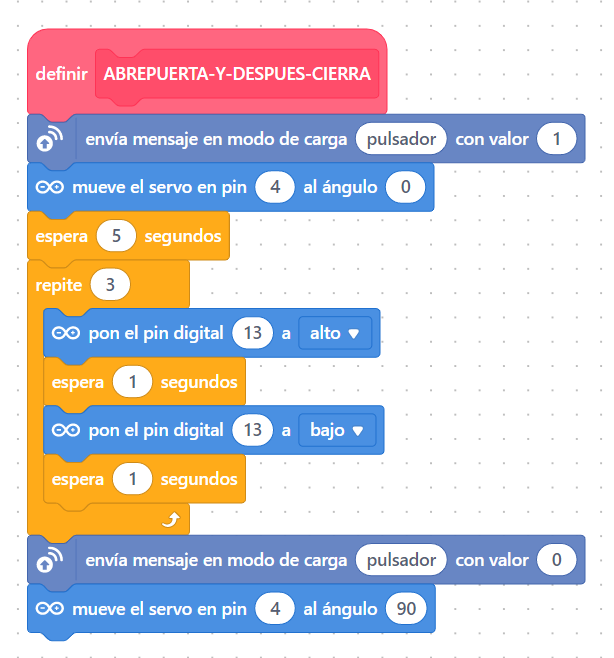](https://libros.catedu.es/uploads/images/gallery/2023-12/domotica-joystick5.png) Finalmente bloque JOYSTICK -RGB que lee los pines de entrada A2 y A3. Son valores desde 0 hasta +1024 pero la posición central del Joystick está en 500, luego tenemos que contar desde 500 hasta 1024, luego hay que convertirlos a 0-255 Esos valores ya normalizados transmitirlos a los pines digitales donde está conectado el pin rojo y azul del led RGB por PWM [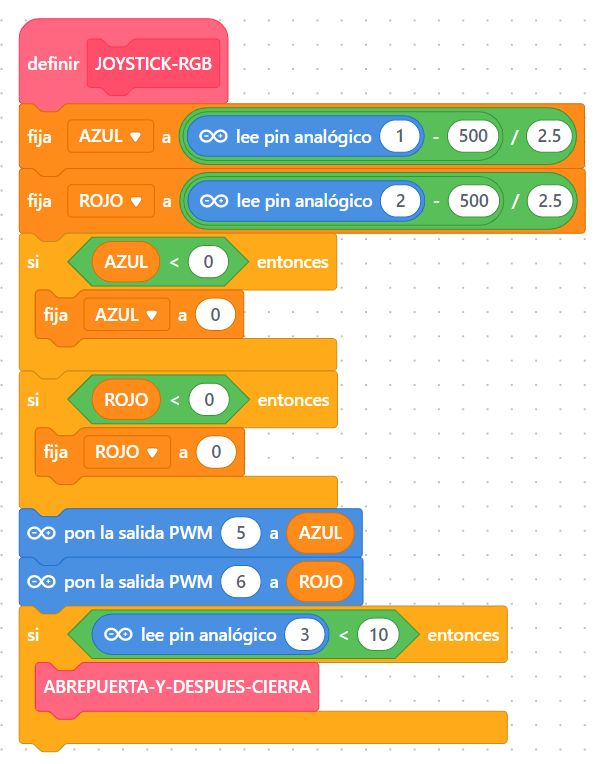](https://libros.catedu.es/uploads/images/gallery/2023-12/domotica-joystick6.png) **OBJETO OSO PANDA** recoge la LUZ [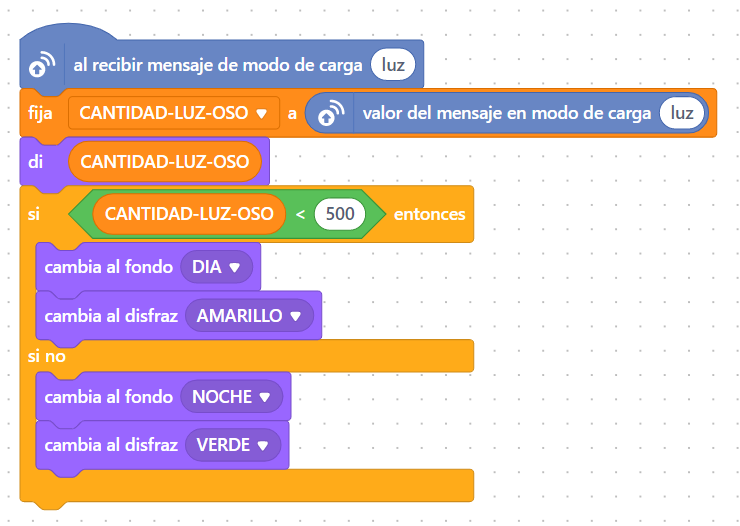](https://libros.catedu.es/uploads/images/gallery/2023-12/domotica-joystick7.png) **El OBJETO PUERTA** Que recoge los mensajes del sensor táctil [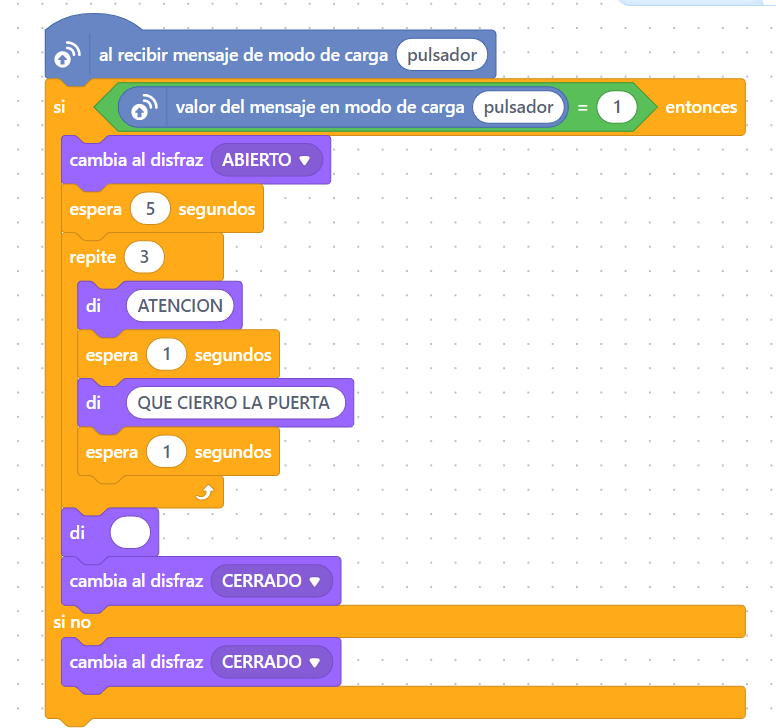](https://libros.catedu.es/uploads/images/gallery/2023-12/domotica-joystick9.png) **OBJETO WATER** recoge el mensaje gotera y aparece si hay [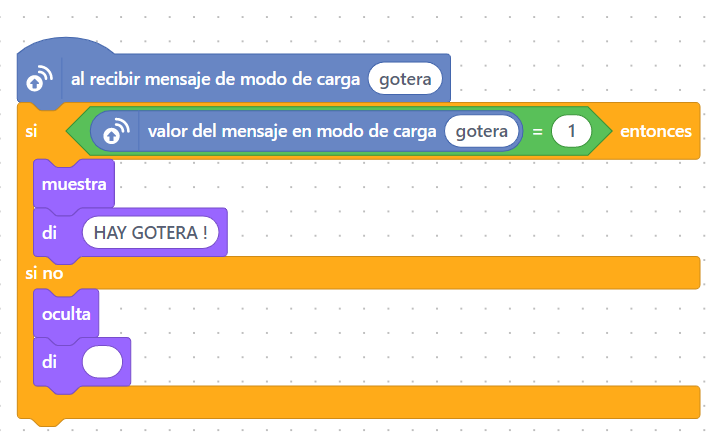](https://libros.catedu.es/uploads/images/gallery/2023-12/domotica-joystick10.png) # ALARMA LASER ## **Conocimientos previos** El diodo láser es un elemento motivador, barato y fácil de usar con el Arduino pues se activa digitalmente:  Si quieres saber más de este componente, te recomendamos [esta página de Luis Llamas](https://www.luisllamas.es/diodo-laser-arduino/). Si tienes que comprar uno, te recomendamos que no sea superior a 5mW, pues puede dañar permanentemente la retina del ojo \[[+info](https://cuidatuvista.com/punteros-laser-juguetes-ojos/)\]. El modelo que te proponemos es de 1mW, no obstante, **EVITA SIEMPRE QUE EL LÁSER APUNTE A LOS OJOS** especialmente con niños. ## **Reto** - **ALARMA** - Si activo la alarma el láser tiene que encenderse - Una vez activada si se corta el láser, por lo tanto el valor del LDR sube, la alarma se dispara. - Si desactivo la alarma - La alarma se apaga si se ha disparado, también por pantalla - El laser de apaga. - Mantenemos la alarma **agua** - Si se detecta agua, suena un aviso, también por pantalla - Mantenemos el **pulsador exterior** - Si se pulsa, la puerta se abre y se mantiene 5seg - Se cierra automáticamente pero antes avisa, con un led y por pantalla - Mantenemos el **Joystick** - Si se mueve, se visualiza el led RGB colores azul y verde - si se pulsa se abre la puerta No mantenemos la programación del interruptor crepuscular pues necesitamos el LDR para la alarma  #### **Solución maqueta** En este caso **hay que tener cuidado con la fijación del láser y el LDR para que apunte al LDR** y otra cuestión son los cables: al instalarse fuera de la casa hay que utilizar cables largos o añadir dos M-H consecutivos. - Hemos utilizado dos fijaciones con alambre el LDR para que quede fijo. - En el láser hemos fijado con una chincheta para fijar el láser además de alambre - Truco, si la maqueta va a estar fija, una buena gota con la pistola de pegamento es mano de santo para que se quede fijo 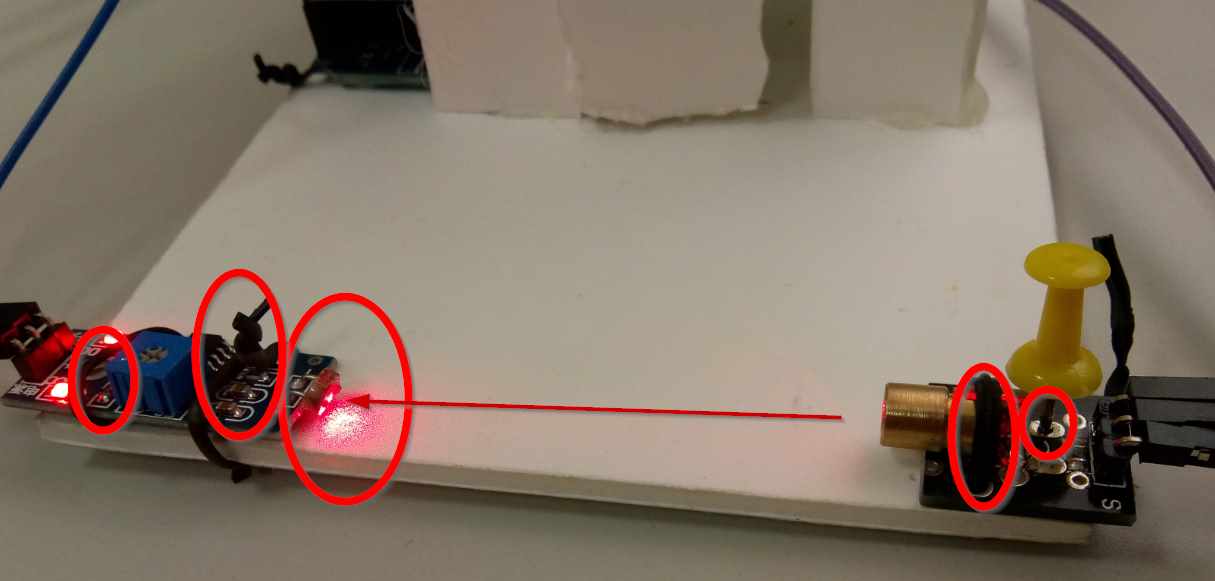 #### **Solución conexiones eléctricas** - La alimentación del láser y el del LDR igual que en los casos anteriores - El control del LÁSER a la salida digital D10 - La lectura del LDR a la entrada analógica A0 - El resto: Joystick, detector fuego, sensor de agua, igual que las páginas anteriores #### **Solución vídeo** #### **Solución programa** El programa lo tienes aquí [https://planet.mblock.cc/project/3255982](https://planet.mblock.cc/project/3255982) Principalmente el difícil es el bloque Alarma [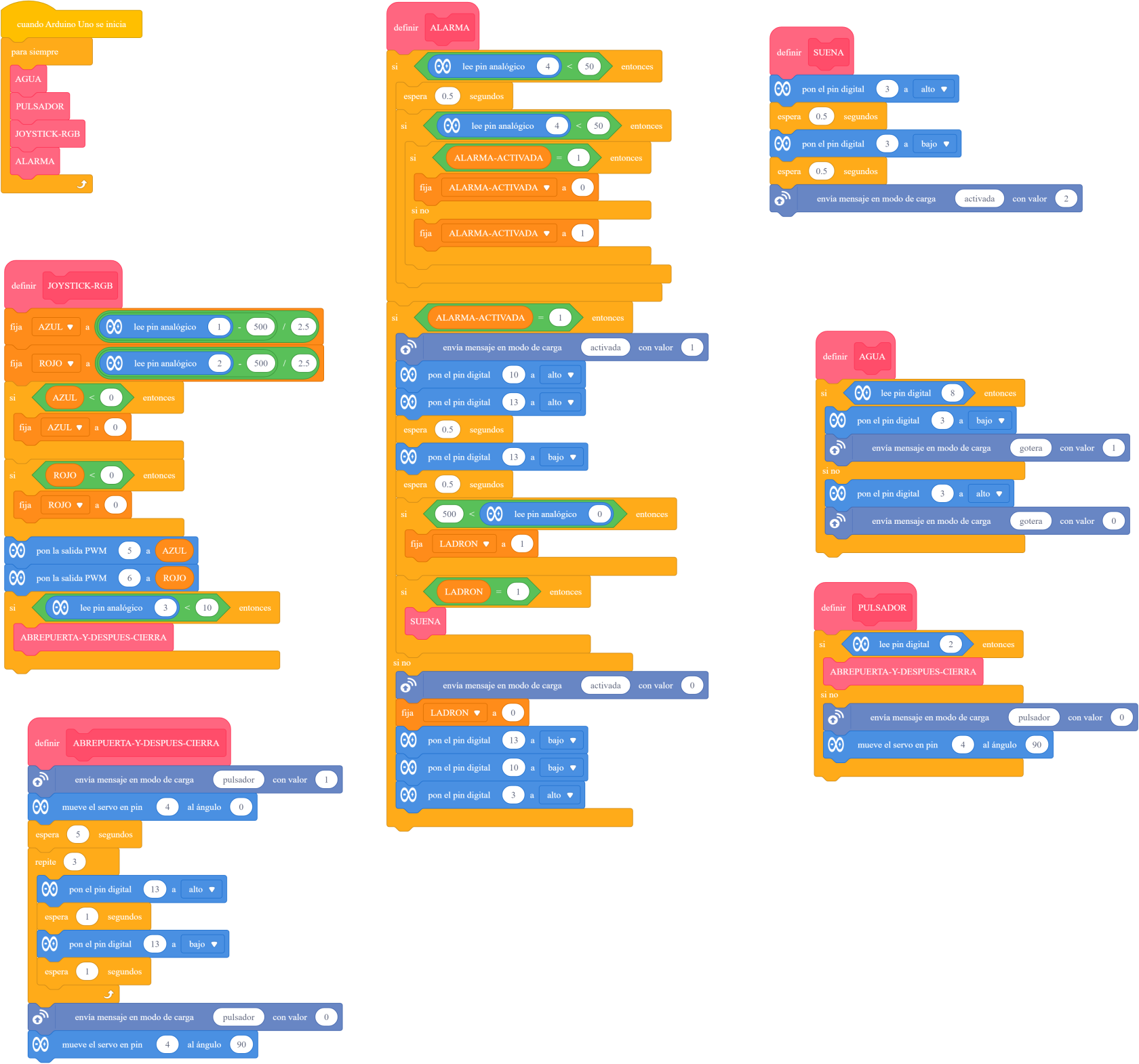](https://libros.catedu.es/uploads/images/gallery/2023-12/domotica-alarma.png) Los otros objetos Objeto puerta [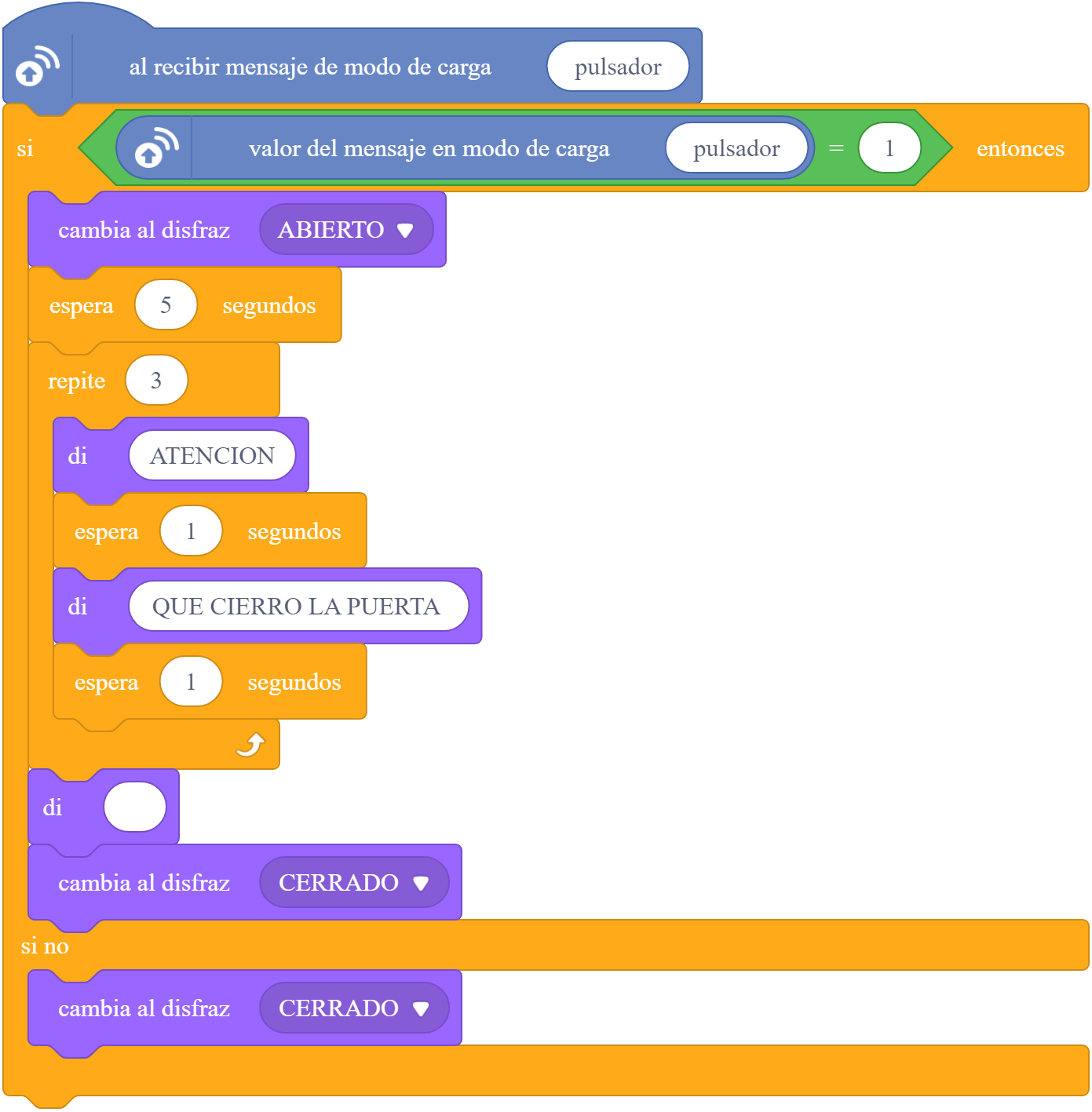](https://libros.catedu.es/uploads/images/gallery/2023-12/domotica-alarma2.png) Objeto gota [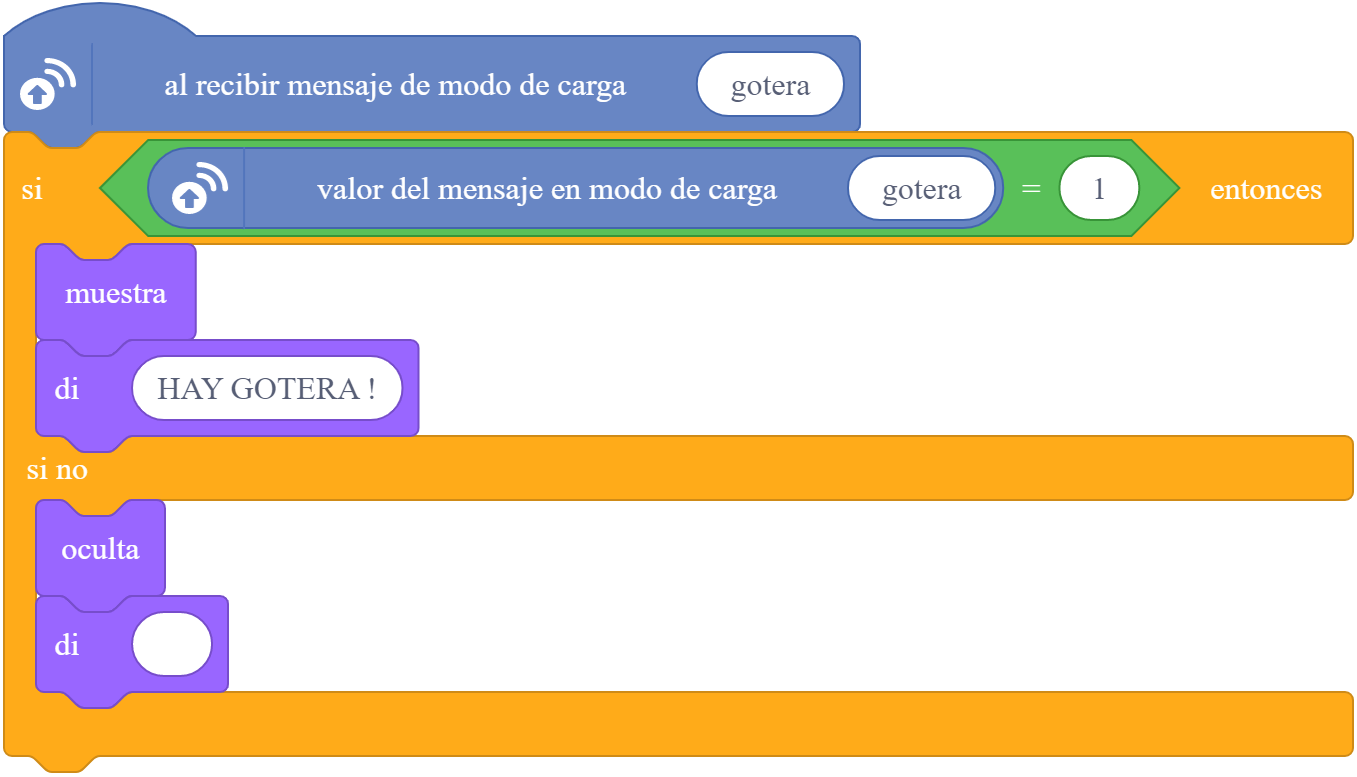](https://libros.catedu.es/uploads/images/gallery/2023-12/domotica-alarma3.png) Objeto Policia [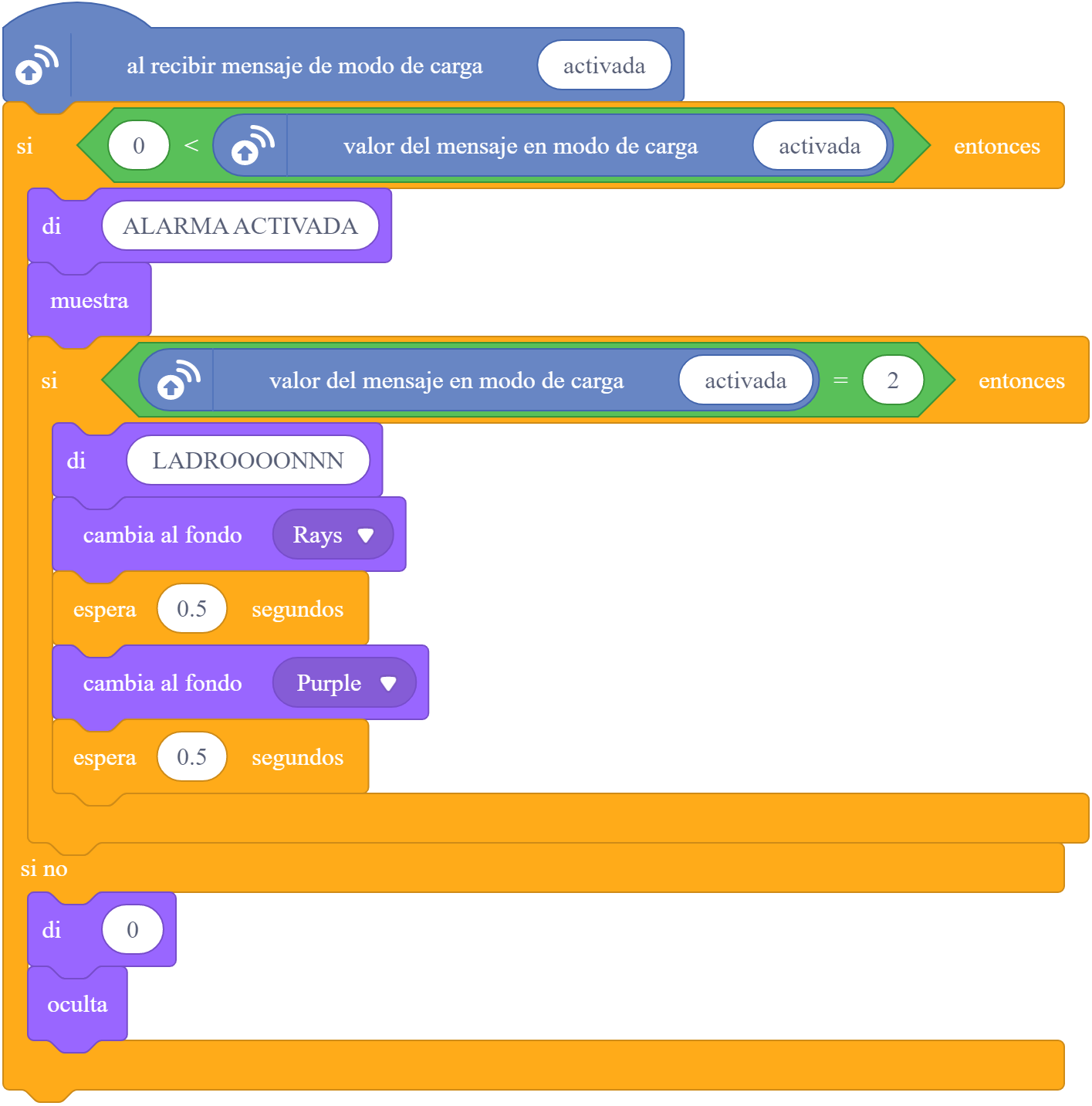](https://libros.catedu.es/uploads/images/gallery/2023-12/domotica-alarma4.png) ## **Otra opción** En vez de un láser, con un SENSOR DISTANCIA POR ULTRASONIDOS 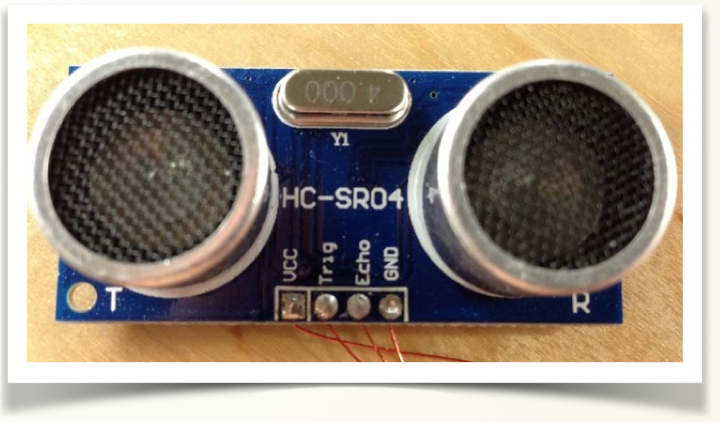 Este sensor mide las distancias utilizando el eco: *Un* ojo *marcado con la T es un altavoz: Emite un sonido ultrasónico fuera de lo audible* El otro *ojo* marcado con una R es un micrófono que detecta el pulso emitido por T. 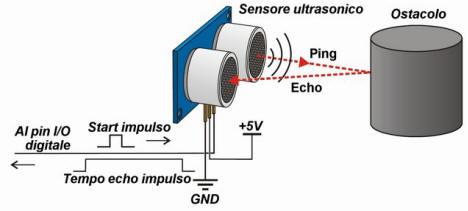 Por software hay que calcular la distancia utilizando la fórmula v=e/t donde v es la velocidad del sonido. Si quieres saber más de este sensor mira esta página de [Luis Llamas.](https://www.luisllamas.es/medir-distancia-con-arduino-y-sensor-de-ultrasonidos-hc-sr04/) su código en mBlock es muy sencillo:  Podríamos usar uno más profesional, por ejemplo [DETECTOR DE MOVIMIENTO CON ARDUINO Y SENSOR PIR](https://www.luisllamas.es/detector-de-movimiento-con-arduino-y-sensor-pir/), pero su ángulo de sensibilidad es tan abierto que todo el rato se dispara. (un rollo si se utiliza en clase). Reto alternativo - Si se pulsa el botón de activación - Si la alarma no está activada - **Activa** la alarma, es decir *está vigilando*. - Si la alarma está activada - **Desactiva** la alarma, *deja de vigilar*. - Si la alarma está disparada - Anula el disparo y desactiva la alarma - Si la alarma está activada: - Está encendido el led verde para indicar que *está vigilando*. - Si detecta un *intruso* a menos de 10 cm - Se **dispara** la alarma, es decir se enciende la luz roja y el buzzer de forma intermitente, no se apaga hasta que se pulsa el interruptor. Conexiones - Entradas y salidas digitales - D3 Buzzer - D5 Blue de led RGB - D6 Red de led RGB - D7 Green de led RGB - D12 Echo del sensor de ultrasonidos - D13 Trg del sensor de ultrasonidos - Entradas y salidas analógicas - A4 Pulsador Video El programa lo puedes descargar [aquí](https://drive.google.com/open?id=1bV5VehaV7vf1eMwBAjru-LZ0Wh9E75Wq) pero realizado en mBlock3 # BLUETOOTH pasos previos ### **Conocimientos previos** {{@3000#bkmrk-tienes-que-visitar-l}} {{@3000#bkmrk-%C2%BFqu%C3%A9-es-el-hc-06%3F-la}} {{@3000#bkmrk-aprende-a-configurar}} {{@3000#bkmrk-configuraci%C3%B3n-avanza}} ##### **En mBlock INSTALAR LA EXTENSIÓN HC-06** Entramos en Extensión [](https://libros.catedu.es/uploads/images/gallery/2023-12/domotica-bluetooth1.png) Y ponemos en el buscador HC-06 nosotros hemos elegido esta, pero podría ser otra, es cuestión de experimentar [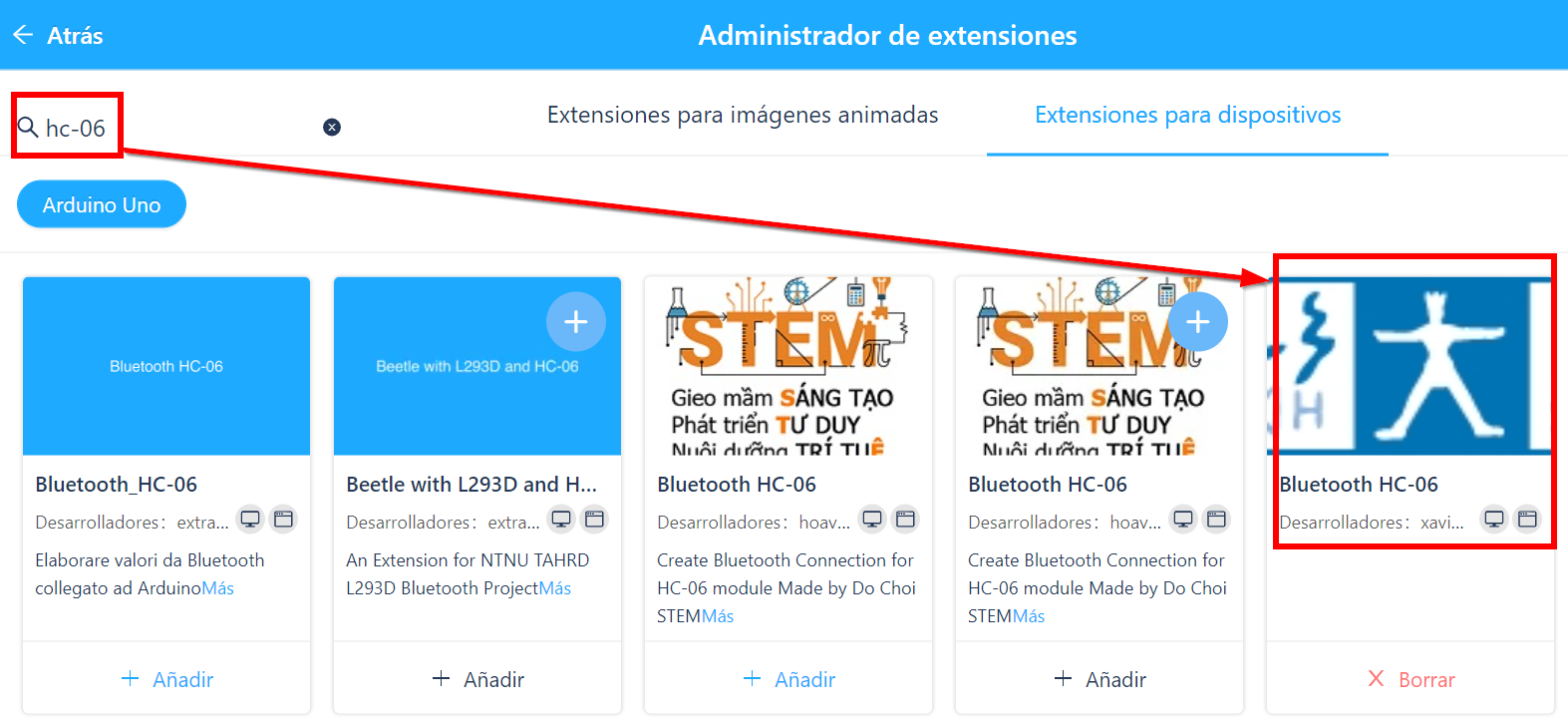](https://libros.catedu.es/uploads/images/gallery/2023-12/domotica-bluetooth2.png) IMPORTANTE - SOLO FUNCIONA CARGANDO EL PROGRAMA en vivo no - NO PUEDES USAR ESTAS INTRUCCIONES DENTRO DE UN BLOQUE no entiendo por qué, si alguien lo consigue que me lo diga [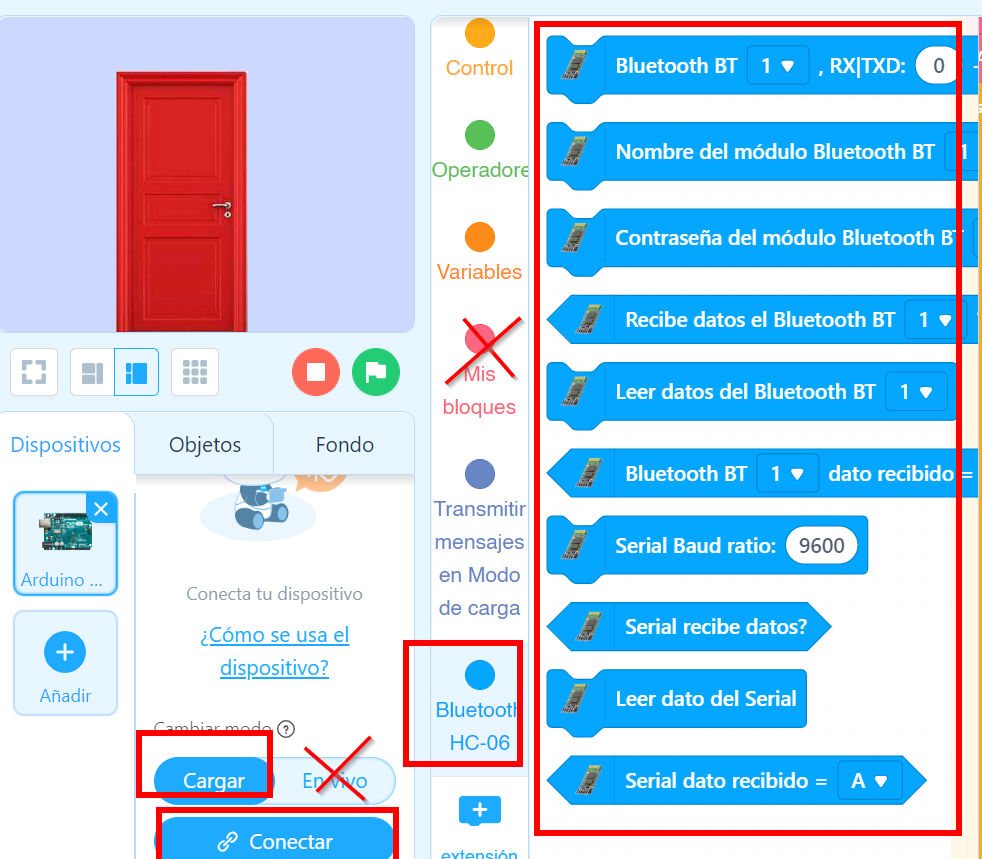](https://libros.catedu.es/uploads/images/gallery/2023-12/domotica-bluetooth3.png) ##### **Un ejemplo: Apertura simple de la puerta** Conectamos: - RX del HC-06 en 12 - TX del HC-06 en 11 - El servo de la puerta en D4 y el código es: [https://planet.mblock.cc/project/3481632](https://planet.mblock.cc/project/3481632) [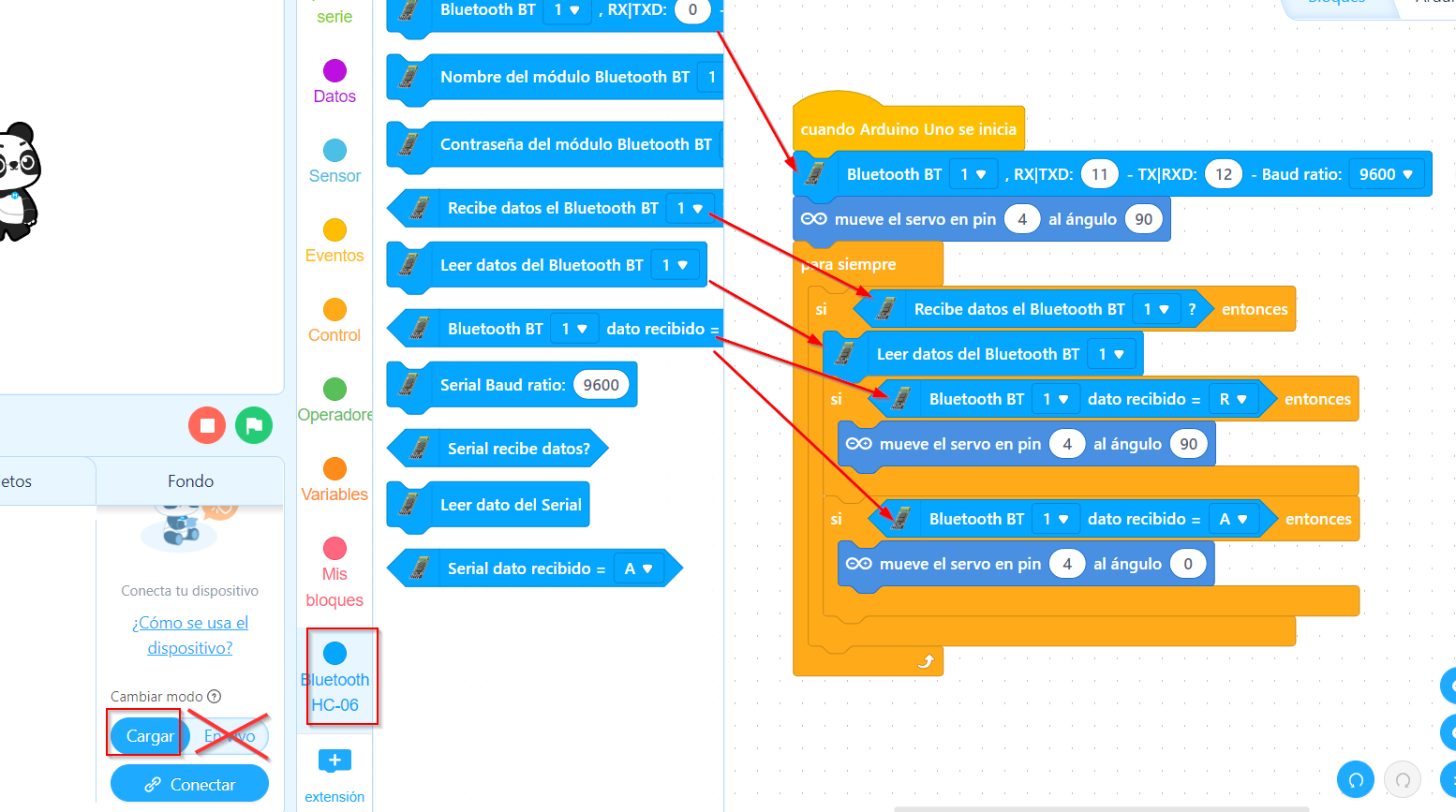](https://libros.catedu.es/uploads/images/gallery/2024-02/mblock-bluetooch-simpleapartura.png) . # BLUETOOTH ### **Reto** {{@3000#bkmrk-controlar-nuestra-ca}} {{@3000#bkmrk-comando-voz-dato-des}} {{@3000#bkmrk-lo-tienes-que-hacer-}} ##### **Solución conexiones eléctricas** {{@3000#bkmrk-conectaremos-vcc-y-g}} ##### **Solución vídeo** ##### **Solución programa** El programa lo tienes aquí : [https://planet.mblock.cc/project/3259600](https://planet.mblock.cc/project/3259600) Todo este código, si lo pongo en un bloque, NO FUNCIONA, no sé por qué, así que a lo bruto en el bloque principal [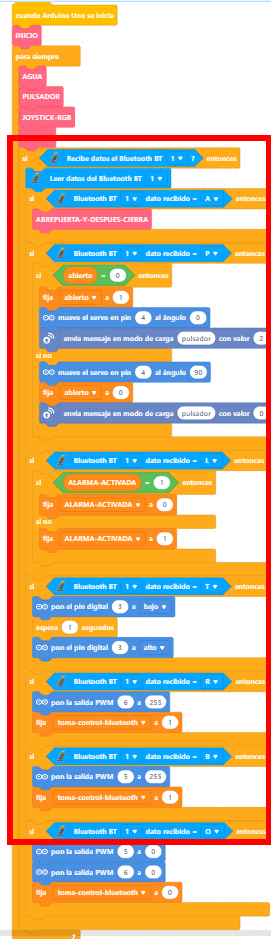](https://libros.catedu.es/uploads/images/gallery/2023-12/domotica-bluetooth4.png) Total que el programa del dispositivo Arduino queda bastante monstruoso [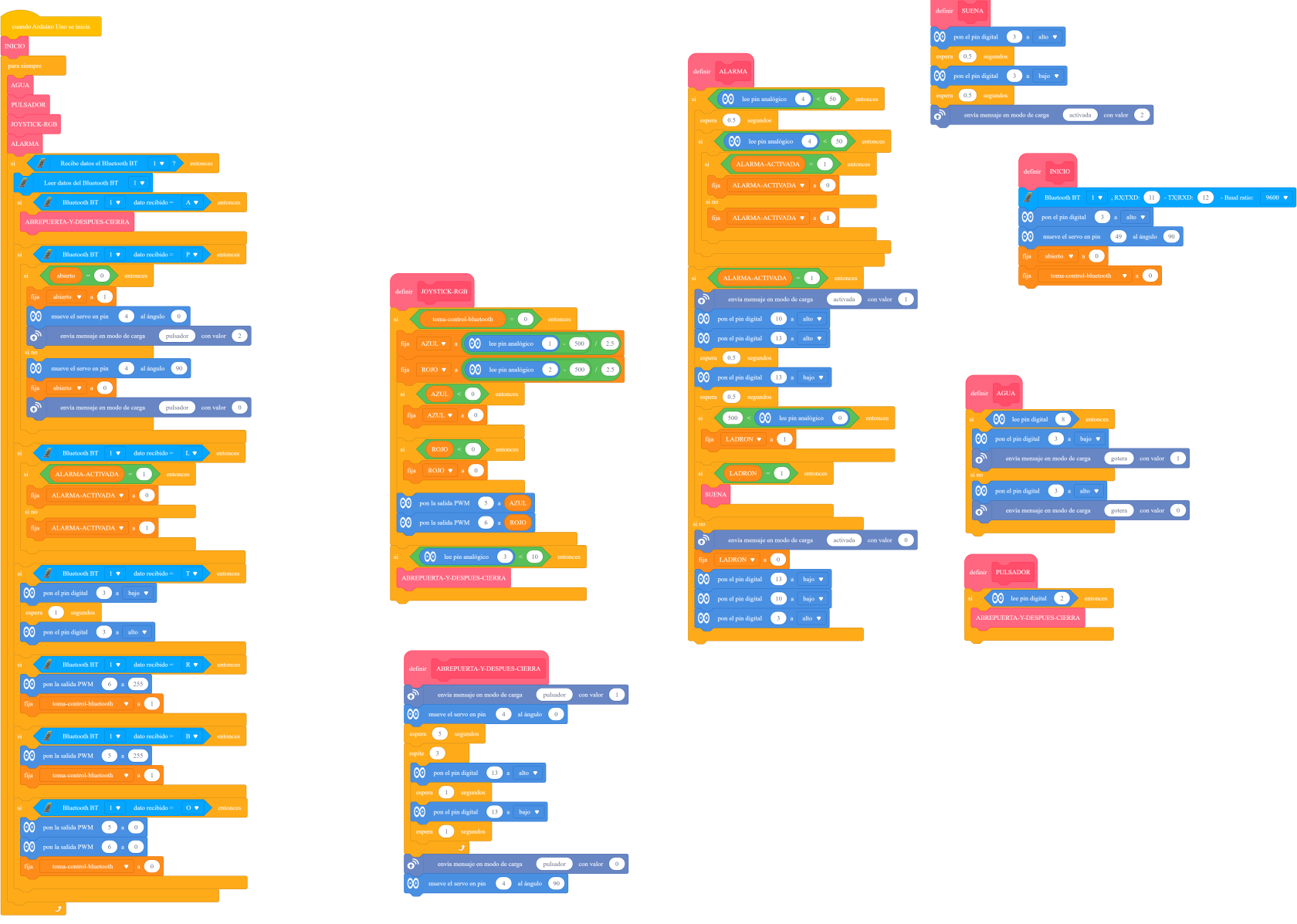](https://libros.catedu.es/uploads/images/gallery/2023-12/domotica-bluetooth5.png) Objeto puerta [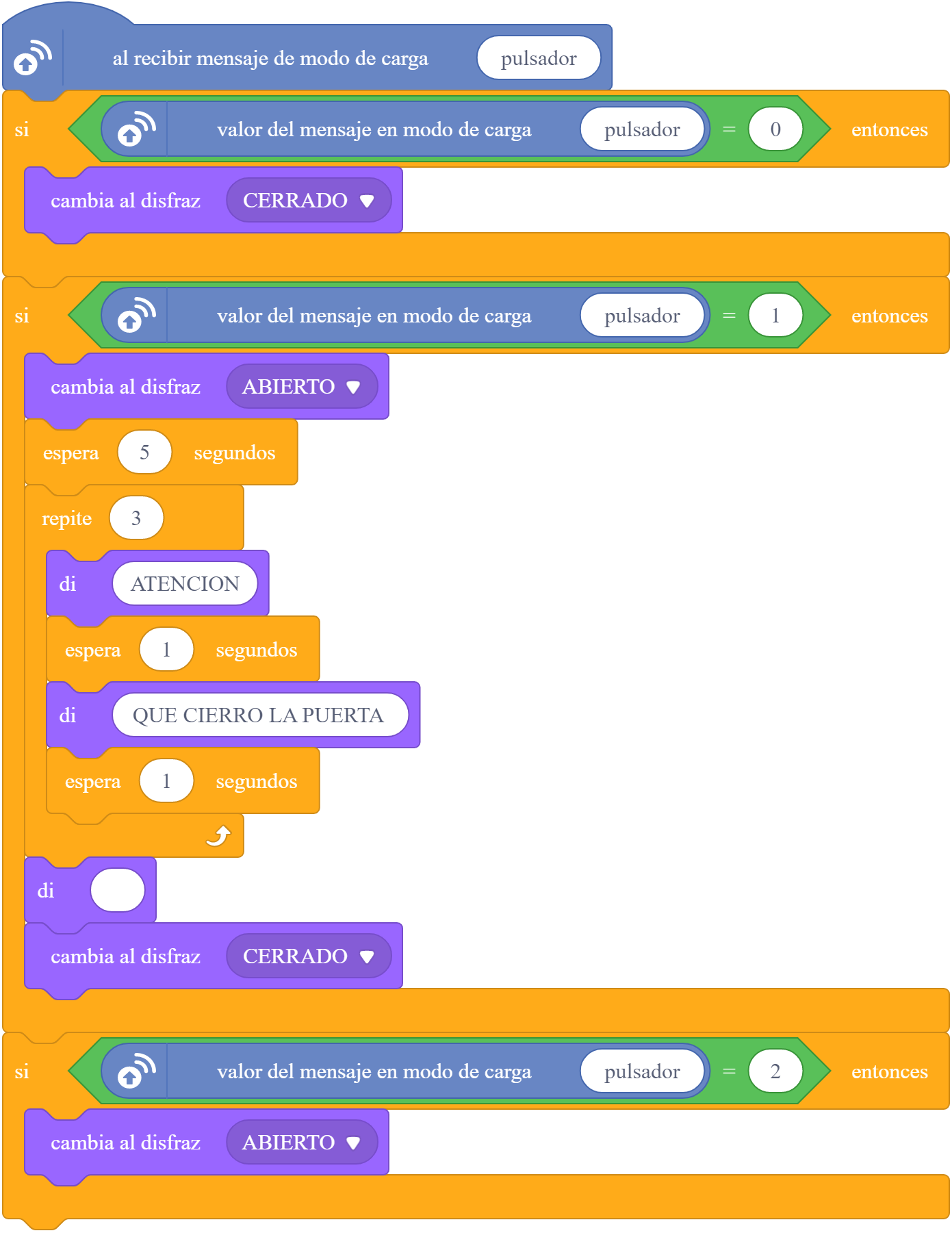](https://libros.catedu.es/uploads/images/gallery/2023-12/domotica-bluetooth6.png) Objeto gotera [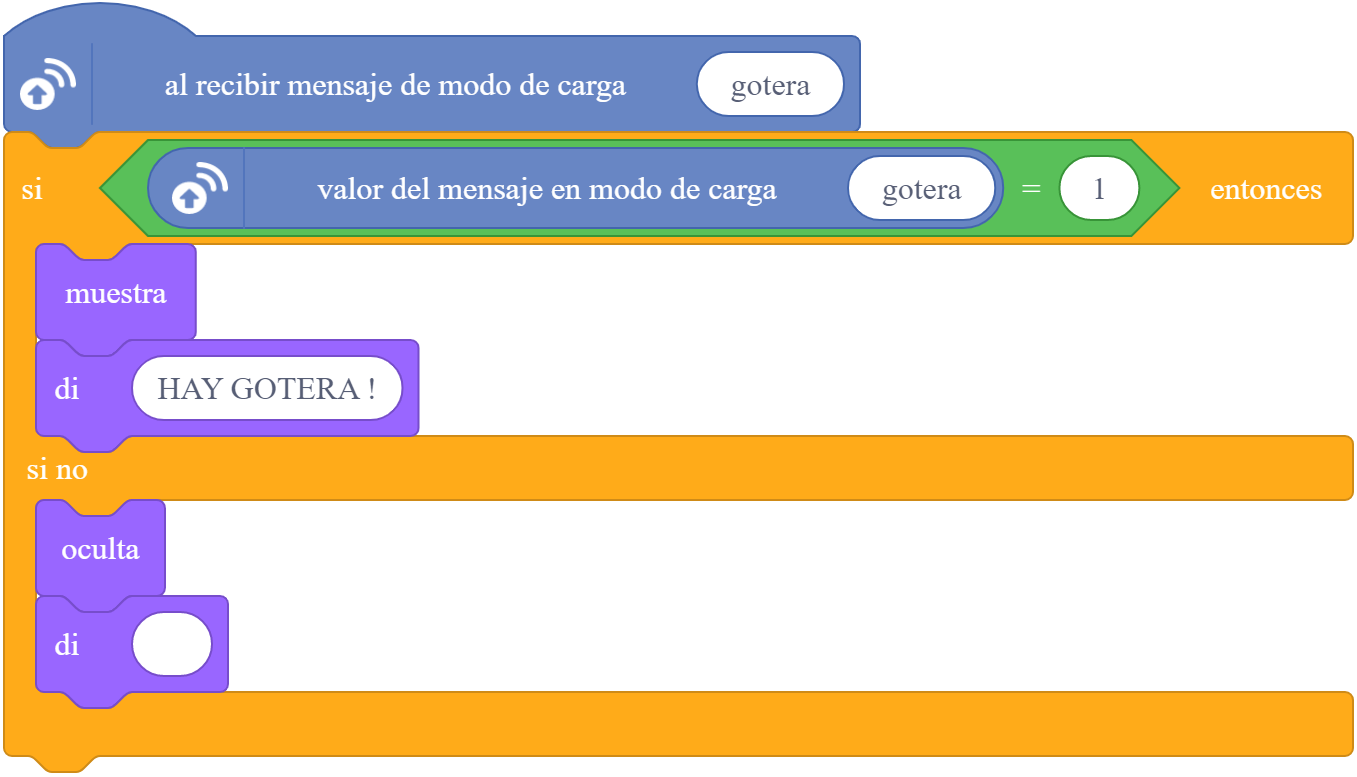](https://libros.catedu.es/uploads/images/gallery/2023-12/domotica-bluetooth7.png) Objeto policia [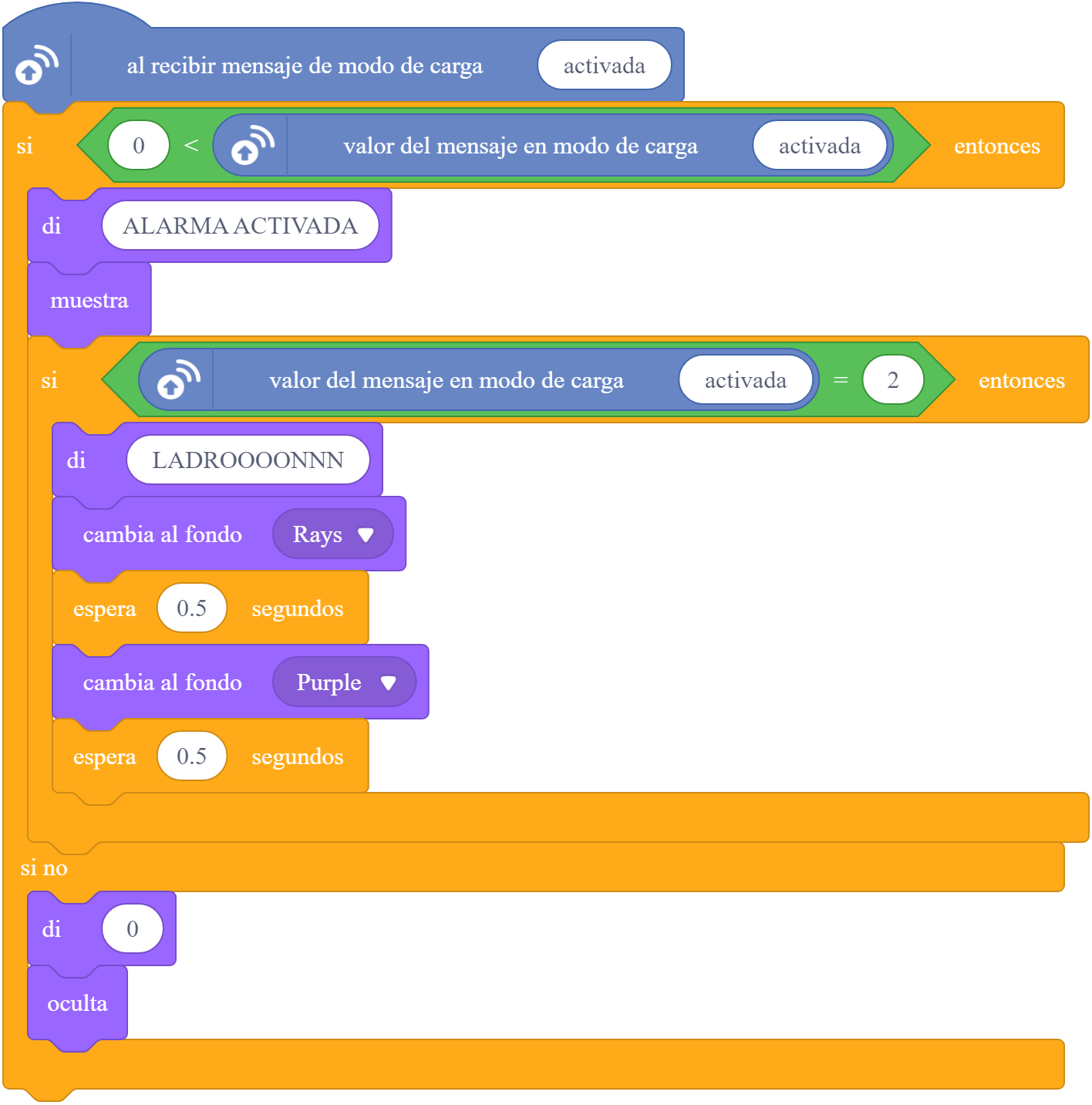](https://libros.catedu.es/uploads/images/gallery/2023-12/45ydomotica-bluetooth8.png) # 3 Programación en código # Entorno de programación {{@2938}} # Maqueta Compramos una hoja de **cartón piedra** de formato A3 (el doble de un folio) y lo cortamos por la mitad a la larga, y en dos cuadrados la otra mitad. En uno de esos cuadrados recortamos la puerta, en total sólo 3 paredes y el suelo es la otra parte de arriba:  La mejor forma de pegarlo es con pistola, pero también clavando agujas o las dos a la vez. Para ir poniendo los componentes lo más fácil y reciclable es perforar, con una simple punta de bolígrafo:  Y atarlo con alambre plastificado típicos de las bolsas de pan de molde:  El soporte del servomotor con la puerta es difícil, una opción es pegarlo con una pistola de pegamento.  Tanto el cartón piedra como el alambre se puede conseguir en cualquier bazar a precios muy económicos. Otra opción para la apertura de la puerta es usar un palillo : [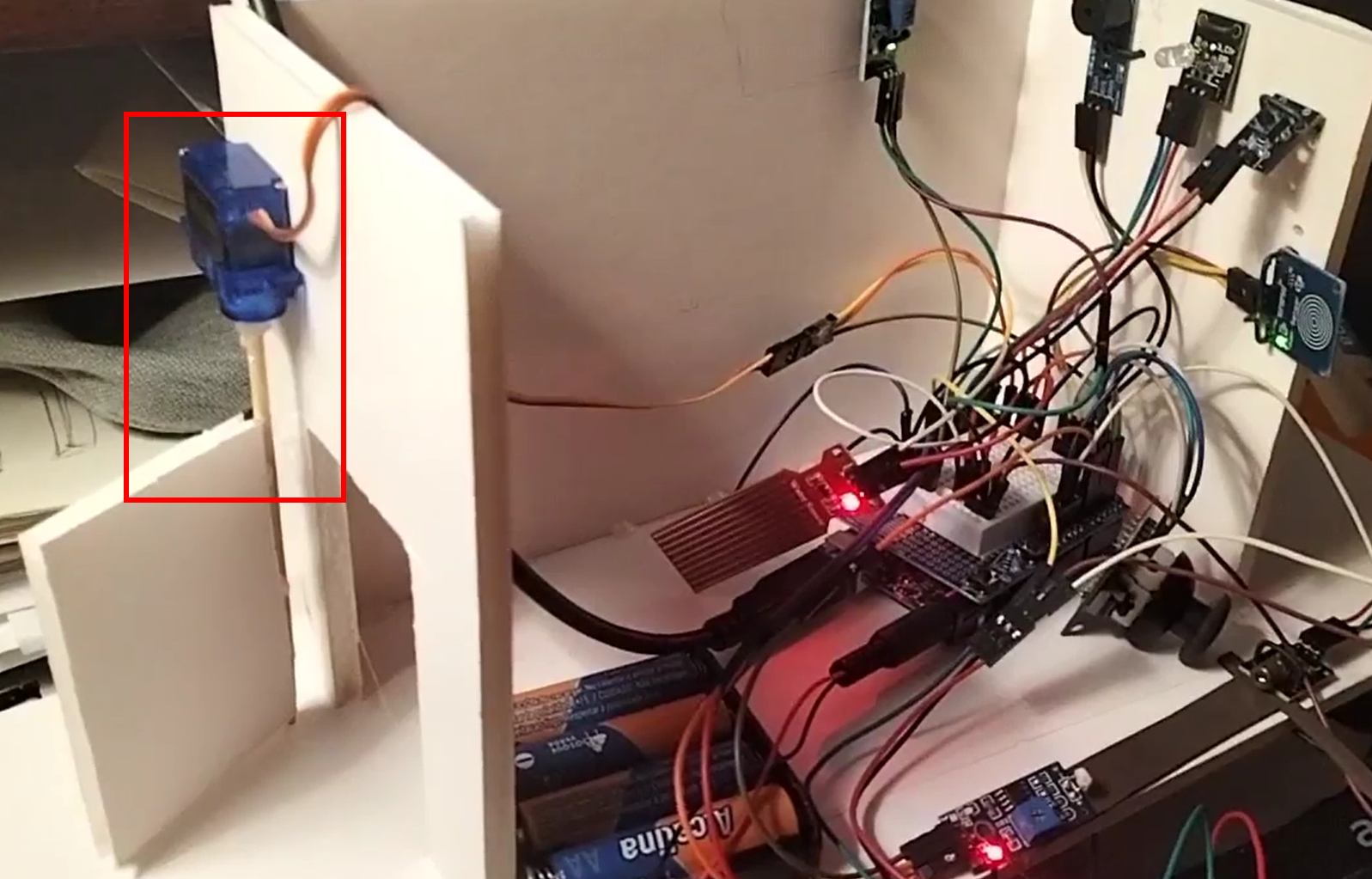](https://libros.catedu.es/uploads/images/gallery/2023-05/2023-05-12-19-11-44-vid20230510235454-mp4-google-drive.png) # APERTURA DE PUERTA ## **Reto** Esta vez vamos a centrarnos con la apertura de la puerta, dejaremos el LDR para la alarma - Cuando se pulse el interruptor táctil (sería como una llave táctil) - Se abre la puerta - Al cabo de 5 segundos, tiempo suficiente para entrar - Se avisa que la puerta se va a cerrar con 3 pulsos buzzer - Se cierra la puerta - Por la pantalla del ordenador saldrán mensajes de apertura y cierre ##### **Solución maqueta** Esta vez en la maqueta ponemos los siguientes elementos 1. Fijación placa Arduino 1. Fijación placa Arduino 1. Interruptor táctil 1. Buzzer 1. Servo 1. Portapilas 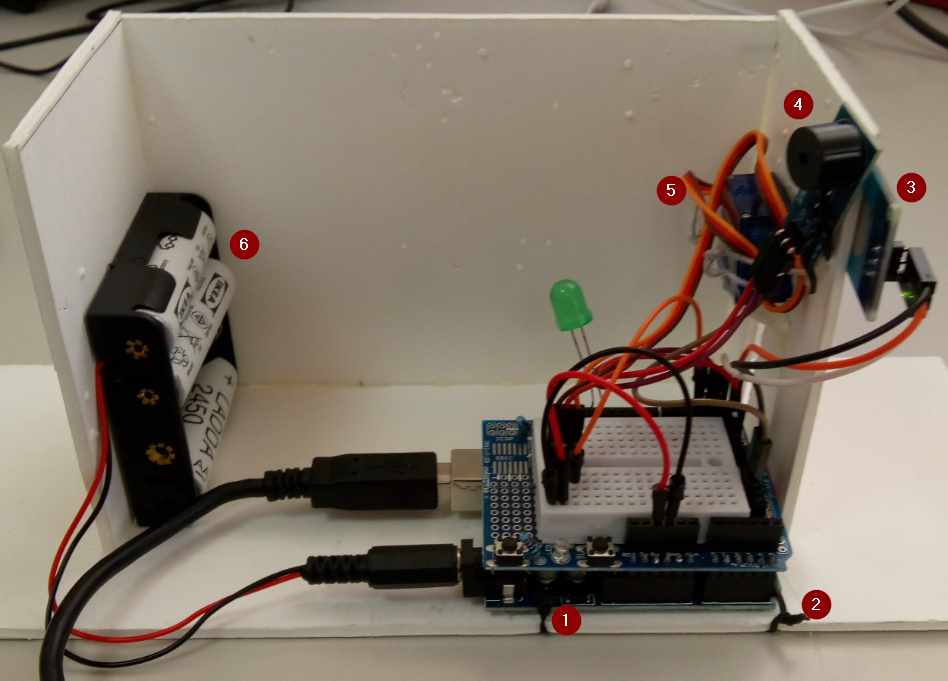 Detalle por delante 1. Interruptor táctil 2. Fijación servo 3. Fijación servo 4. Puerta \*si, ya sé, un poco chapuza ¿y qué pasa? \* 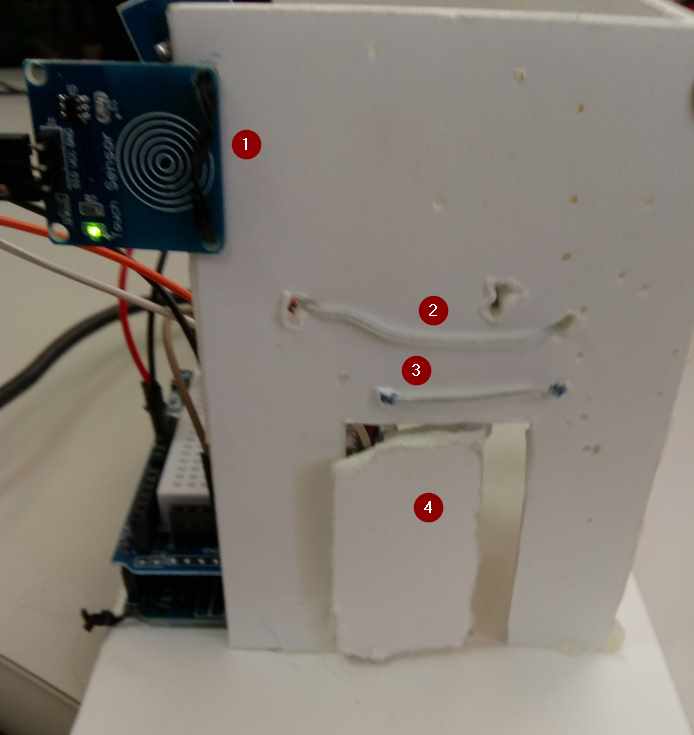 ##### **Solución esquema de conexiones** Es el mismo mostrado en [APERTURA DE LA PUERTA](https://libros.catedu.es/24-apertura-puerta.md), pero ahora vamos montando la maqueta: 1. Terminales GND 2. Terminales +5V 3. Terminales Servo van aparte (ver nota) con D4 al control del servo 4. Terminales 1. D2 Interruptor táctil 2. D3 Buzzer activo 5. Interruptor táctil 6. Buzzer activo 7. Servo 8. Led el pin largo en D13 y el corto en GND. 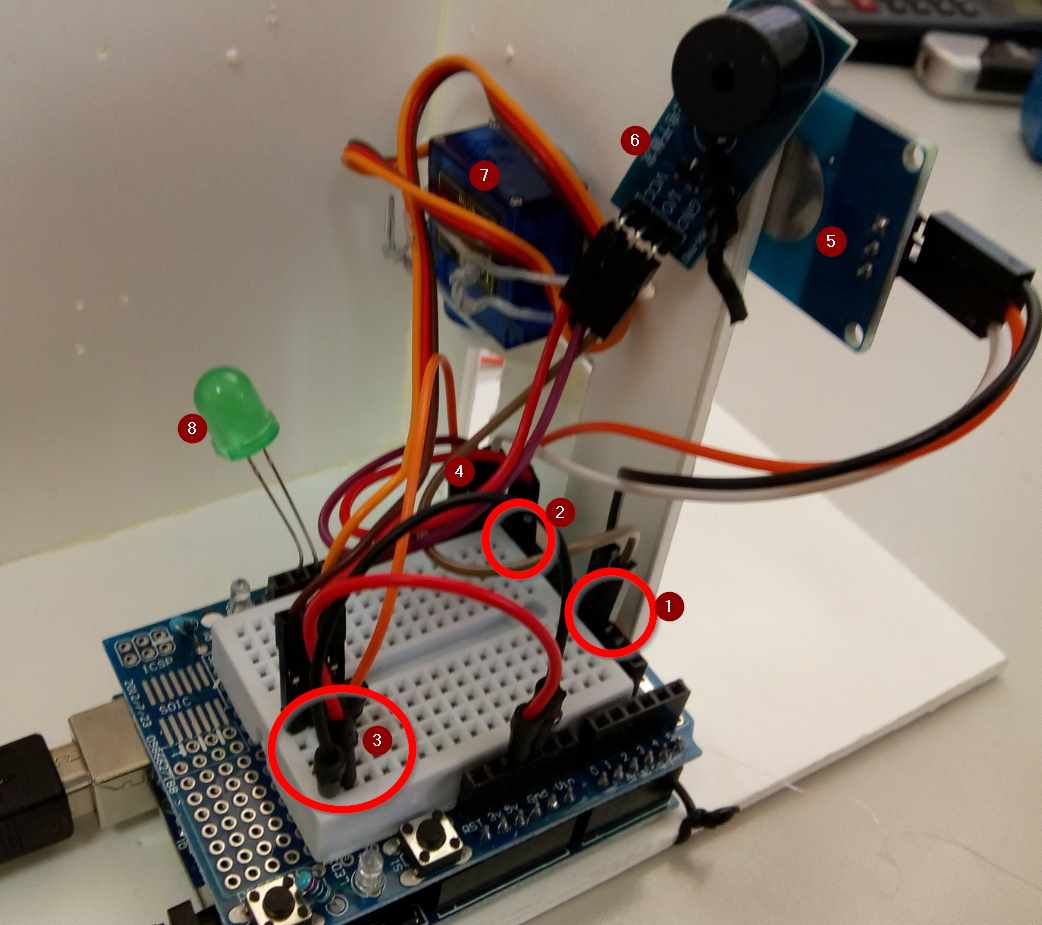 > Nota: El servo al tener terminales hembra, se ha optado por conectarlo directamente en la placa protoboard utilizando machos machos como el de la figura:  > **Nota**: Sí, ya sé que conectar el **LED DIRECTAMENTE EN D13 no es una buena práctica,** pero internamente Arduino tiene unas resistencias en cada entrada/salida de 30k que lo puede aguantar, o sea, no es lo correcto pero no pasa nada (y como es muy cómodo, y necesitamos espacio, optamos por lo práctico). Si lo pones al revés no funcionará (no se estropea nada pero asegúrate el pin largo al D13 y el corto al GND). ##### **Solución video** ##### **Solución código** [https://create.arduino.cc/editor/javierquintana/f89a2537-117b-4140-806f-5c79ef4f684a/preview](https://create.arduino.cc/editor/javierquintana/f89a2537-117b-4140-806f-5c79ef4f684a/preview) # JOYSTICK ## **Reto** Ahora vamos a utilizar el Joystick para dos intenciones: - Aprovechando el SWITCH central: - Si se hace una pulsación larga: - la puerta se abre (si estaba cerrada) - o se cierra (si estaba abierta) - El mando del Joystick nos regulará una luz ambiental - El eje X en azul - El eje y el rojo - Un valor intermedio es un valor de los dos ##### **Solución maqueta** Vamos ampliando nuestra casa domótica con la luz RGB y el Joystick: 1. Joystick fijado en la pared 2. Led RGB fijado en la pared 3. Conexiones Joystick en entradas analógicas 4. Conexiones de RGB a las salidas digitales 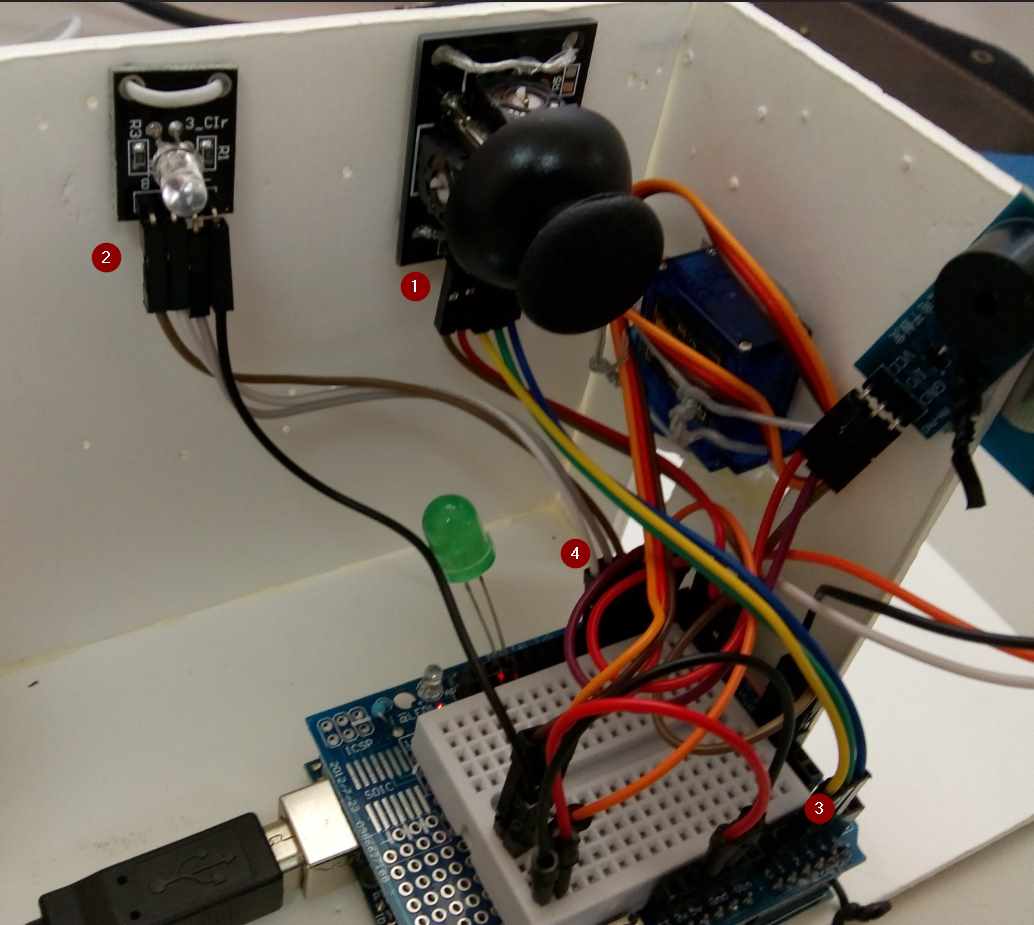 ##### **Solución esquema eléctrico** Es igual que cuando vimos [Joystick:](https://libros.catedu.es/26-joystick.md) 1. Terminales GND del led RGB y del Joystick 2. Terminal +5V del Joystick 3. Otra opción de conectar el terminal GND 4. Otra opción de conectar +5V y las demás conexiones igual que antes: - D5 PWM al Rojo del RGB (tiene que ser PWM) - D6 PWM al Azul del RGB (tiene que ser PWM) - D7 al Verde del RGB (luego lo utilizaremos) - A1 al EJEX JOYSTICK - A2 al EJEY JOYSTICK - A3 al SWITCH JOYSTICKNota: El microruptor del Joystick es digital luego lo apropiado es conectarlo en una entrada salida digital, pero como vamos escasos de entradas y salidas digitales (ya verés como esto se complica), lo trataremos como analógico.
 ##### **Solución vídeo** ##### **Solución código** [https://create.arduino.cc/editor/javierquintana/f4dfc995-5a42-4d45-a911-238f67b0c169/preview](https://create.arduino.cc/editor/javierquintana/f4dfc995-5a42-4d45-a911-238f67b0c169/preview) # ALARMA AGUA ## **Reto** Ahora vamos a utilizar el sensor de agua para prevenir "accidentes" en casa - Si el sensor de agua detecta líquido - Suena una alarma de 10 pulsos mientras esté funcionando - Si la puerta estuviera abierta - La cierra pues entraría agua ##### **Solución esquema eléctrico** - Sensor de Agua en D8 igual que vimos en la parte de bloques - Alimentación GND y +5V del sensor de agua o en 1 y 2 o en 3 y 4 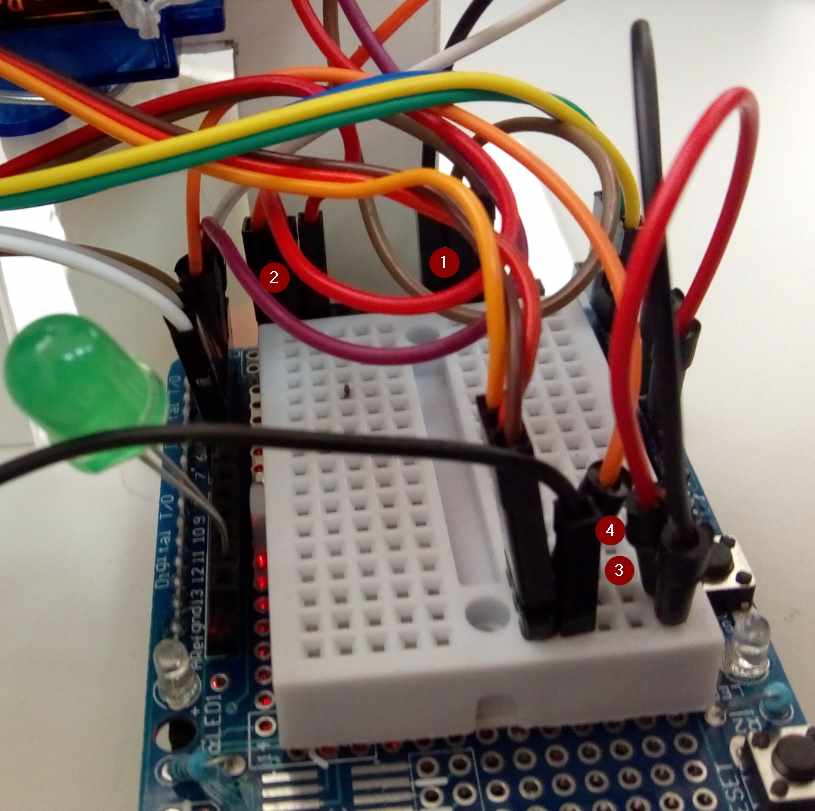 ##### **Solución vídeo** ##### **Solución código** [https://create.arduino.cc/editor/javierquintana/3eaca00b-a7b7-4357-a191-c5cfd33c004a/preview](https://create.arduino.cc/editor/javierquintana/3eaca00b-a7b7-4357-a191-c5cfd33c004a/preview) # FUEGO**ATENCIÓN hemos pensado la utilización del sensor de fuego sólo en la parte de CODIGO, pues es para nivel de secundaria.** **Implica la utilización de un mechero, con el peligro que conlleva. Utilizar este ejemplo en clase bajo responsabilidad y supervisión del docente.**
## **Reto** Tenemos que hacer dos programaciones \* Activar o no la alarma \* cuando hay una pulsación larga en el pulsador escondido, se activa o se desactiva la alarma \* si se ha disparado la alarma tiene que apagarla \* Disparo de la alarma \* Si la alarma está actividad, vigilando y se produce una detección, la alarma tiene que sonar hasta que la desactivamos con una pulsación larga del pulsador. ##### **Solución maqueta** Fijaremos en la pared el sensor llama que lo vimos anteriormente en 2.7 y el pulsador de activación o no de la alarma. 1. Sensor llama 2. Pulsador analógico 3. Conexión sensor llama a la entrada digital 4. Conexión del pulsador analógico a la entrada analógica Las alimentaciones de los dos sensores igual que en las páginas anteriores. 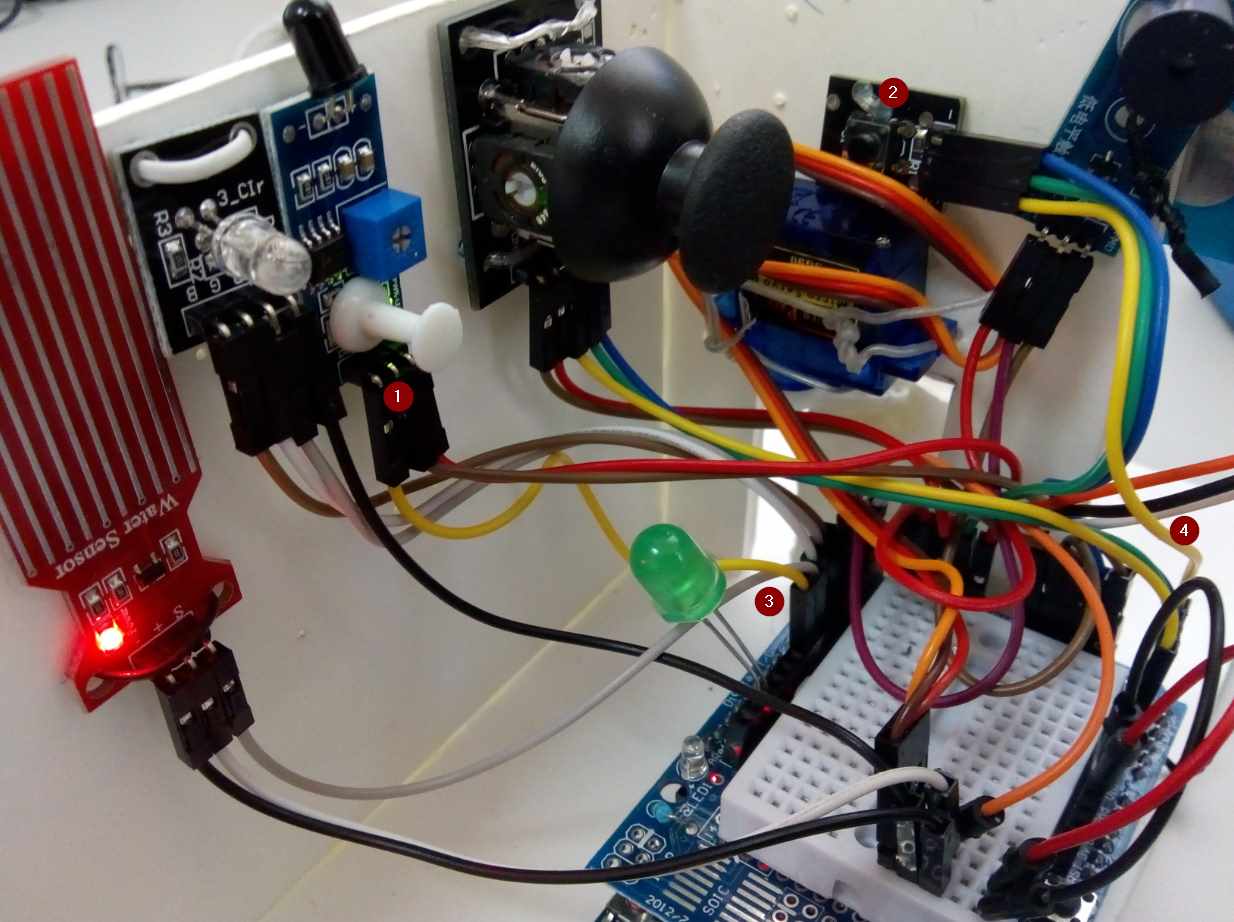 ##### **Solución esquema eléctrico** - Sensor llama a D9 - Pulsador analógico a A4 ##### **Solución vídeo** ##### **Solución código** [https://create.arduino.cc/editor/javierquintana/fce4e1a9-c2c2-4806-9540-04c3d26c04bd/preview](https://create.arduino.cc/editor/javierquintana/fce4e1a9-c2c2-4806-9540-04c3d26c04bd/preview) # LÁSER {{@2992#bkmrk-el-diodo-l%C3%A1ser-es-un}} {{@2992#bkmrk-}} {{@2992#bkmrk-si-quieres-saber-m%C3%A1s}} ## **Reto** - Si activo la alarma el láser tiene que encenderse - Una vez activada si se corta el láser, por lo tanto el valor del LDR sube, la alarma se dispara. - Si desactivo la alarma - La alarma se apaga si se ha disparado - El laser de apaga. ##### **Solución vídeo** ##### **Solución maqueta** {{@2992#bkmrk-en-este-caso-hay-que}} {{@2992#bkmrk-hemos-utilizado-dos-}} {{@2992#bkmrk--1}} ##### **Solución conexiones eléctricas** - La alimentación del láser y el del LDR igual que en los casos anteriores - El control del LÁSER a la salida digital D10 - La lectura del LDR a la entrada analógica A0 **Solución código**Aquí lo tienes [https://create.arduino.cc/editor/javierquintana/dfca79db-6299-47c1-beef-7db3350c2cee/preview](https://create.arduino.cc/editor/javierquintana/dfca79db-6299-47c1-beef-7db3350c2cee/preview)
# BLUETOOTH APP->ARDUINO ## Conocimientos previos Tienes que visitar las siguientes páginas de la [Unidad 4 Comunicaciones con Arduino](https://catedu.github.io/programa-arduino-mediante-codigo/arduino_y_mvil.html): - ¿Qué es el [HC-06](https://catedu.github.io/programa-arduino-mediante-codigo/mdulo_bluetooth.html)? - [La APP](https://catedu.github.io/programa-arduino-mediante-codigo/la_app.html) que tienes que intalarte - [Vincular tu móvil con el HC-06](https://catedu.github.io/programa-arduino-mediante-codigo/vincular_mvil.html) con tu móvilAprende a configurar los botones de la APP !! diapositiva 12 pero en vez de Up, Down, Right y Left los que se establezcan en el reto
[Configuración avanzada](https://catedu.github.io/programa-arduino-mediante-codigo/configuracion_avanzada.html) pues **nosotros somos pitos, y conectaremos el HC-06 en los pines digitales D11 y D12** y no en D0 y D1 pues están ocupados con la comunicación del ordenador. El RX del HC-06 en 11 y el TX del HC-06 en el 12
### **RETO BÁSICO: Apertura de puerta y encendido láser.** **Enunciado reto básico** Vamos a realizar : - Que desde la APP ->Placa - Con el comando A abre la puerta - Con el comando R que cierre la puerta - Con el comando L que se encienda o se apague el láser (es decir, si estaba encendido, que se apague, y viceversa) **Conexiones reto básico** - Bluetooth HC-06 RX al 12 y TX al 11 - Puerta servo D4 - Láser al D10 [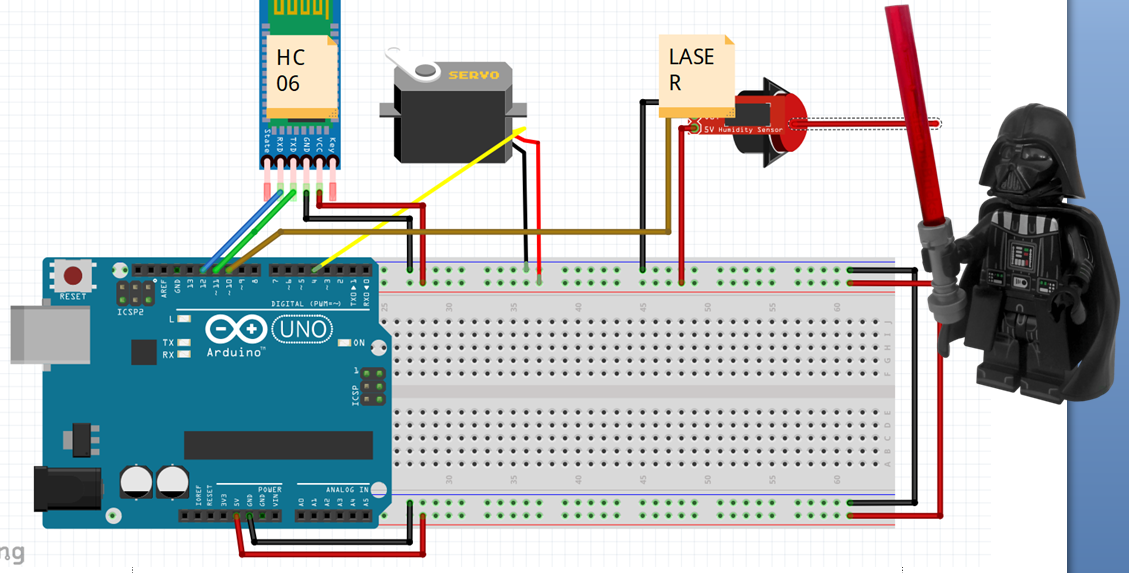](https://libros.catedu.es/uploads/images/gallery/2024-02/domotica-simple-laser.png) El programa es este [https://create.arduino.cc/editor/javierquintana/88cfa21b-a86c-428c-95c4-a89a62a9218d/preview](https://create.arduino.cc/editor/javierquintana/88cfa21b-a86c-428c-95c4-a89a62a9218d/preview) **Reto básico Resultado** [https://www.youtube.com/shorts/vSjZBe\_iEIQ](https://www.youtube.com/shorts/vSjZBe_iEIQ) ### **Reto avanzado** Controlar nuestra casa con el móvil, para ello vamos a definir los siguientes comandos:| COMANDO | VOZ | DATO | descripción |
|---|---|---|---|
| Comando 1 | abrir | A | abrir la puerta y cierra automáticamente |
| Comando 2 | puerta | P | abrir/cerrar la puerta |
| Comando 3 | alarma | L | activar/desactivar la alarma |
| Comando 4 | pit | T | hace un pit |
| Comando 5 | rojo | R | enciende luz interior roja |
| Comando 6 | azul | B | enciende luz interior azul |
| Comando 7 | apaga | O | apaga luces interiores |
Recuerda que con la APP que existen en GOOGLE PLAY como la utilizada en el capítulo anterior [https://libros.catedu.es/books/domotica-con-arduino/page/bluetooth](https://libros.catedu.es/books/domotica-con-arduino/page/bluetooth-app-arduino-I6y) la comunicación es PLACA<-APP
### **RETO BÁSICO** **Enunciado reto básico** Vamos a realizar : - Que desde la APP ->Placa - Con el comando A abre la puerta - Con el comando R que cierre la puerta - Con el comando L que se encienda o se apague el láser (es decir, si estaba encendido, que se apague, y viceversa) - Que desde la Placa ->APP - Si detecta ladrón que avise **Conexiones reto básico** - Bluetooth HC-06 RX al 12 y TX al 11 - Puerta servo D4 - Láser D10 apuntando al LDR - Sensor LDR D9 [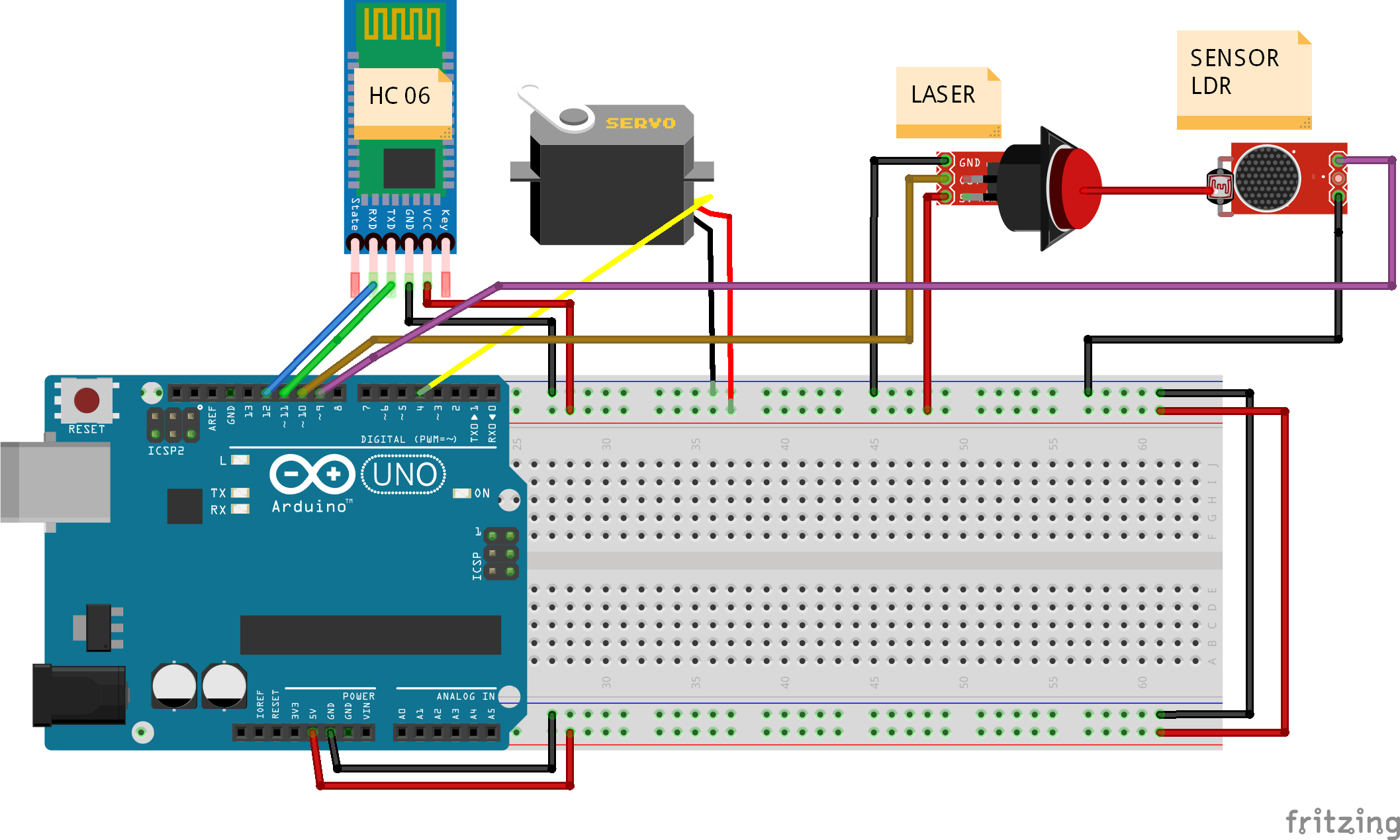](https://libros.catedu.es/uploads/images/gallery/2024-02/arduino-domotica-basico-bidireccional-bluetooth-bb.png) **RETO BÁSICO LA APP EN APP INVENTOR** los pasos son parecidos a los tratados en [https://libros.catedu.es/books/arduino-en-el-aula/page/app-tdr-steam-app-inventor-blocks](https://libros.catedu.es/books/arduino-en-el-aula/page/app-tdr-steam-app-inventor-blocks)Lo tienes en [https://gallery.appinventor.mit.edu/?galleryid=286eb7c2-792d-436c-b7d0-3d9e1e0592aa](https://gallery.appinventor.mit.edu/?galleryid=286eb7c2-792d-436c-b7d0-3d9e1e0592aa)
Para llevar la APP al móvil mira [https://libros.catedu.es/books/arduino-en-el-aula/page/llevar-la-app-creada-en-app-inventor-al-movil](https://libros.catedu.es/books/arduino-en-el-aula/page/llevar-la-app-creada-en-app-inventor-al-movil) **RETO BÁSICO PROGRAMA EN EL ARDUINO CON CODIGO**El programa lo tienes aquí [https://create.arduino.cc/editor/javierquintana/ea8fa750-8cd1-48fd-8ea1-65bac09b78ce/preview](https://create.arduino.cc/editor/javierquintana/ea8fa750-8cd1-48fd-8ea1-65bac09b78ce/preview)
**BUG**: Cuando el laser pasa de APAGADO a ENCENDIDO, el LDR es más lento que el programa Arduino y detecta LADRÓN luego desaparece, pero ya se ha quedado el fondo de pantalla rojo. **RETO**: Habría que poner un pequeño retardo delay(500); para solucionar este problema ¿Dónde?
**Resultado video** **[https://www.youtube.com/shorts/RZ\_0EX4OulI?feature=share](https://www.youtube.com/shorts/RZ_0EX4OulI?feature=share)** **** ### **RETO AVANZADO** Como en la página anterior ##### **RETO AVANZADO LA APP EN APP INVENTOR** los pasos son parecidos a los tratados en [https://libros.catedu.es/books/arduino-en-el-aula/page/app-tdr-steam-app-inventor-blocks](https://libros.catedu.es/books/arduino-en-el-aula/page/app-tdr-steam-app-inventor-blocks) Pero en la vista de **Designer**, hemos añadido más botones, imagen, etc... [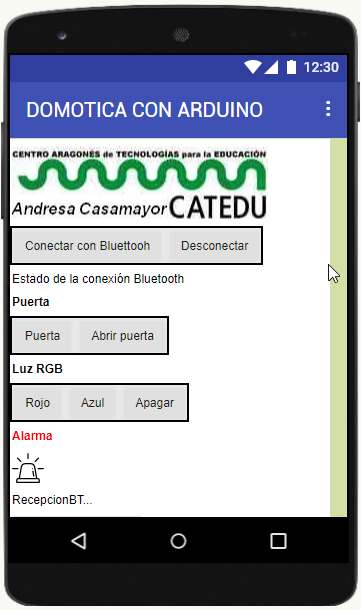](https://libros.catedu.es/uploads/images/gallery/2023-12/designer.jpg) Y la vista de **Blocks** es más completa [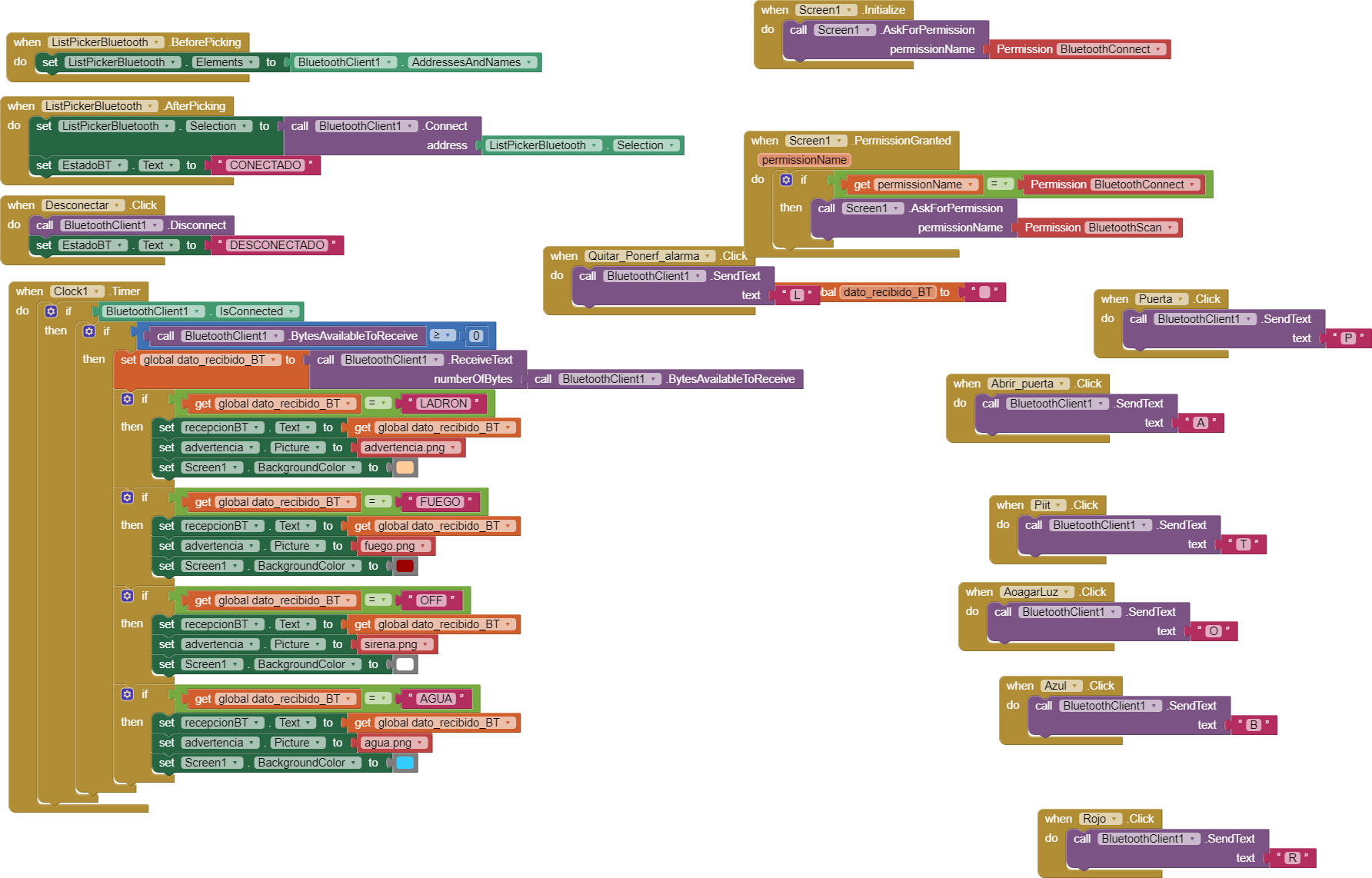](https://libros.catedu.es/uploads/images/gallery/2023-12/mlGblocks.png) El programa lo tienes aquí : [https://gallery.appinventor.mit.edu/?galleryid=b4979892-5df3-4225-90be-538a64d469e0](https://gallery.appinventor.mit.edu/?galleryid=b4979892-5df3-4225-90be-538a64d469e0) ##### **RETO AVANZADO** **EL PROGRAMA EN EL ARDUINO** Y hemos modificado el programa en Arduino para que envíe los comandos por bluetoothBusca los comandos **Serial1.print(...);**
[https://create.arduino.cc/editor/javierquintana/b2c39d6f-d0ef-44e2-bb5b-2d9351dddb94/preview](https://create.arduino.cc/editor/javierquintana/b2c39d6f-d0ef-44e2-bb5b-2d9351dddb94/preview) ##### **RETO AVANZADO** **RESULTADO** [https://youtu.be/gtuJzYvTBJM](https://youtu.be/gtuJzYvTBJM) # 4. Para saber más... # Muro Pon si quieres poner ejemplos tuyos o de otros interesantes: # Créditos ## Autoría - Autor Javier Quintana CATEDU 2018 - Actualización a mBlock 5.0 Javier Quintana CATEDU 2024 {{@3195}} # Lenguajes de programación El Arduino se puede programar - Por bloques (mBlock, Echidna, Scratch, SteamMakerblocks, Blocky....) - Por código principalmente Arduino IDE **En este curso se puede utilizar por bloques o por código LO QUE QUIERAS** Guía de los lenguajes de programación para robotsTenemos un **grupo Telegram Robótica Educativa en Aragón**, [https://t.me/roboticaeducativaaragon](https://t.me/roboticaeducativaaragon)
