Nota: Acuerdate en toda esta sección de poner la Echidna en modo **Sensor**
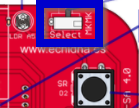 ##### **¿Qué extensiones son las aconsejadas?** Lo tienes en [https://echidna.es/hardware/echidnablack/complementos-echidnablack/](https://echidna.es/hardware/echidnablack/complementos-echidnablack/) [](https://libros.catedu.es/uploads/images/gallery/2024-12/2024-12-16-13-36-45-complementos-echidnablack-echidna-educacion.png) --- Pero no es necesario que sean las aconsejadas, aquí por ejemplo en este vídeo el Echidna se ha colocado en un chasis con unos motores y controlado por el Bluetooth del móvil. Este ejemplo del robot-coche no lo trataremos aquí pues es de un nivel superior, que se trata mejor en [Arduino con código](https://libros.catedu.es/books/programa-arduino-mediante-codigo "Programa Arduino Mediante Codigo") Pero sólo está el límite de tu imaginación para convertir al Echidna el algo más poderoso ... # Servo ##### **Servo** El servo es un motor que podemos controlar el ángulo de giro, hay diferentes clases, pero nos vamos a centrar en este que tiene un precio muy barato: SG90 que varía desde 0º a 180º [](https://libros.catedu.es/uploads/images/gallery/2024-12/arduino-servo-sg90.webp) Fuente Luis Llamas CC-B-SA [https://www.luisllamas.es/controlar-un-servo-con-arduino/](https://www.luisllamas.es/controlar-un-servo-con-arduino/) ##### **Cómo se conecta el servo con la Echidna** El servo tiene tres cables,, marrón, rojo, y amarilo machos, conéctalos a uno de los pines de las extensiones, por ejemplo al D4 marcado como **1**. Fíjate bien, el marrón indica la masa hacia el borde y el amarillo hacia la cara interior: 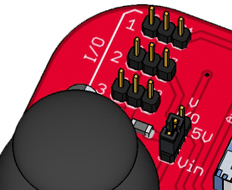 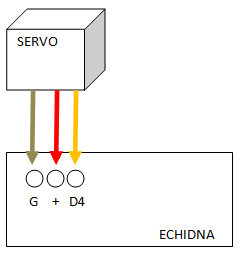[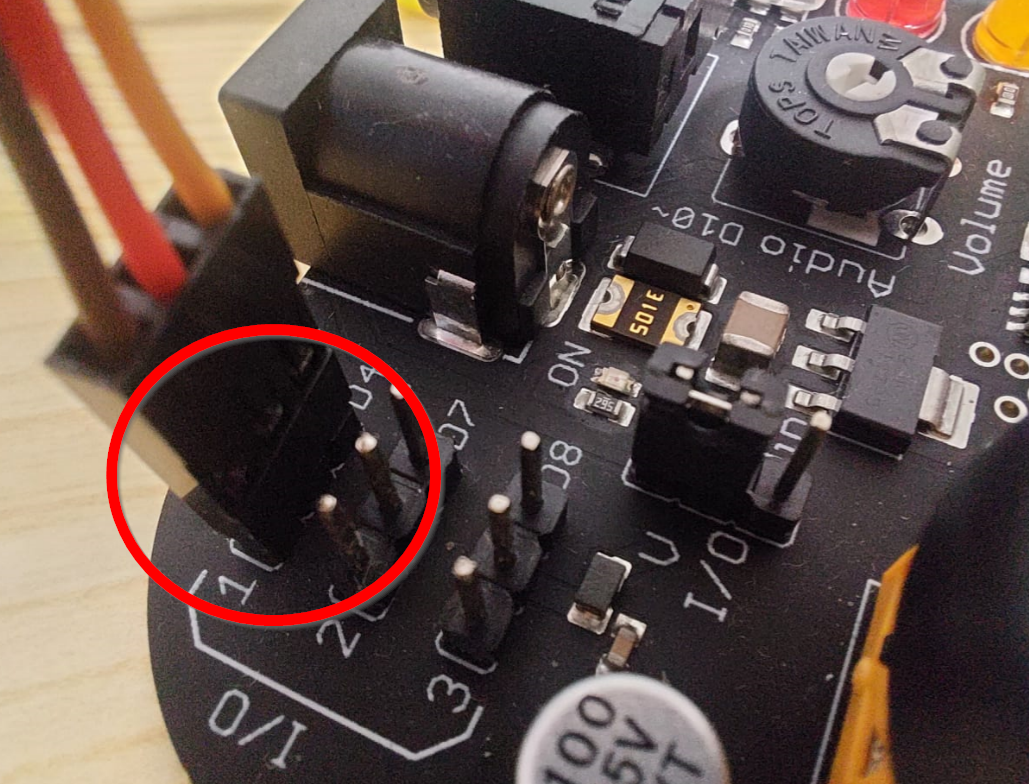](https://libros.catedu.es/uploads/images/gallery/2024-12/2024-12-08-18-10-25-whatsapp.png) ##### **Experimenta con el servo con EchidnaScratch !** Entra en EchidnaScratch, saca su instrucción a la palestra y haz dos cliks, experimenta con varios ángulos, verás que menores que lo mínimo es 0º y lo máximo 180º [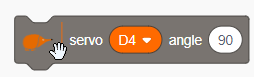](https://libros.catedu.es/uploads/images/gallery/2024-12/instruccion-servo.png)**SUPERFÁCIL !!!**
Aprende más sobre servos en esta página de [Luis Llamas](https://www.luisllamas.es/controlar-un-servo-con-arduino/). ##### **Experimenta con el servo c****on mBlock** Para experimentar tienes que usar esta instrucción [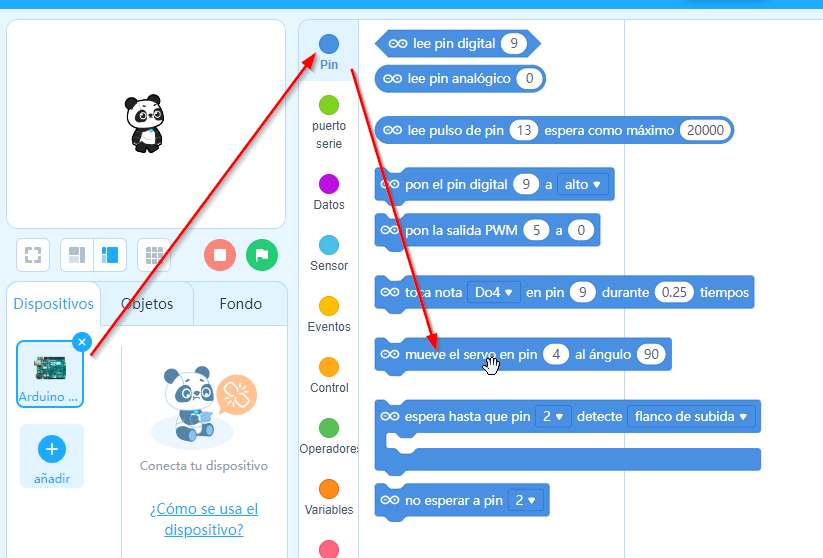](https://libros.catedu.es/uploads/images/gallery/2023-11/echidna-servo1.jpg) Si intentamos trabajar con el servo con ángulos mayores de 180ª no hace caso, va al valor 180ª. Si ejecutas este programa lo verás: [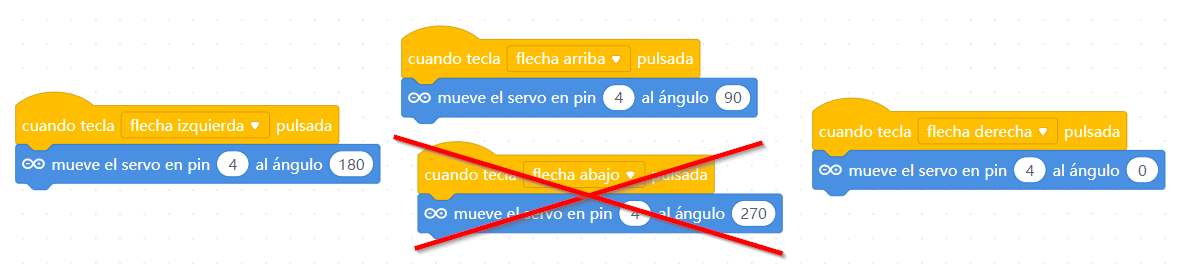](https://libros.catedu.es/uploads/images/gallery/2023-11/echidna-servo2.jpg) Mira la diferencia con un **servo de rotación continúa**, fíjate como: - Los extremos 0º y 180º es a máxima velocidad, pero un sentido u otro. - 90º es parado. - Un valor intermedio es menos velocidad (se ve el ejemplo 80º y 100º) - Si tiene deriva, (cosa frecuente) hay un potenciómetro para ajustar. # Montaje 15 Servo ##### **Montaje 15 Servo**Vamos a hacer un programa que el servo se mueva JUSTO EL MISMO ÁNGULO QUE LA PLACA ECHIDNA para conseguir que el servo se mantenga en su misma posicón.
Para ello hay que tener en cuenta que: - La Echidna cuando no esta inclinada muestra un valor de 350º, vamos a llamarlo ángulo de **inclinación** - El servo cuando está en su punto medio, el brazo está a 90º, vamos a llamarlo **ángulo** al valor que quiero que se mueva el brazo del servo - Por lo tanto entre los dos variables será 350-90=260º - Sí **Ángulo** es igual a **inclinación** menos esa diferencia **260** entonces tenemos que el servo se mantendrá constante en su posición El programa es : [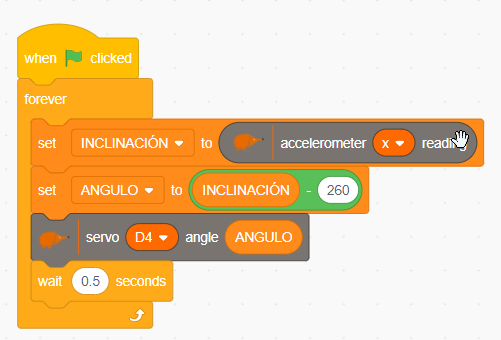](https://libros.catedu.es/uploads/images/gallery/2024-12/montaje14-servo-codigo.png) Se le añade un pequeño retardo de 0.5segundos pues se vuelve algo loco El resultado es Todos los programas de este curso se encuentran en este repositorio: [https://github.com/JavierQuintana/Echidna](https://github.com/JavierQuintana/Echidna)**¿Te atreves..?** A realizar un programa que mueva el **servo según el valor del Joystick ejeY**?
# Montaje 16 Servo con IA ##### **Enunciado**Necesitamos que se reconozca un objeto entre varios de una cinta transportadora para desviarla a su destino correcto
Vamos a distinguir entre paquetes (cajas) y bolsas ##### **Learning ML** Entrenamos la máquina de inteligencia Artificial para que distinga entre un paquete y una bolsa [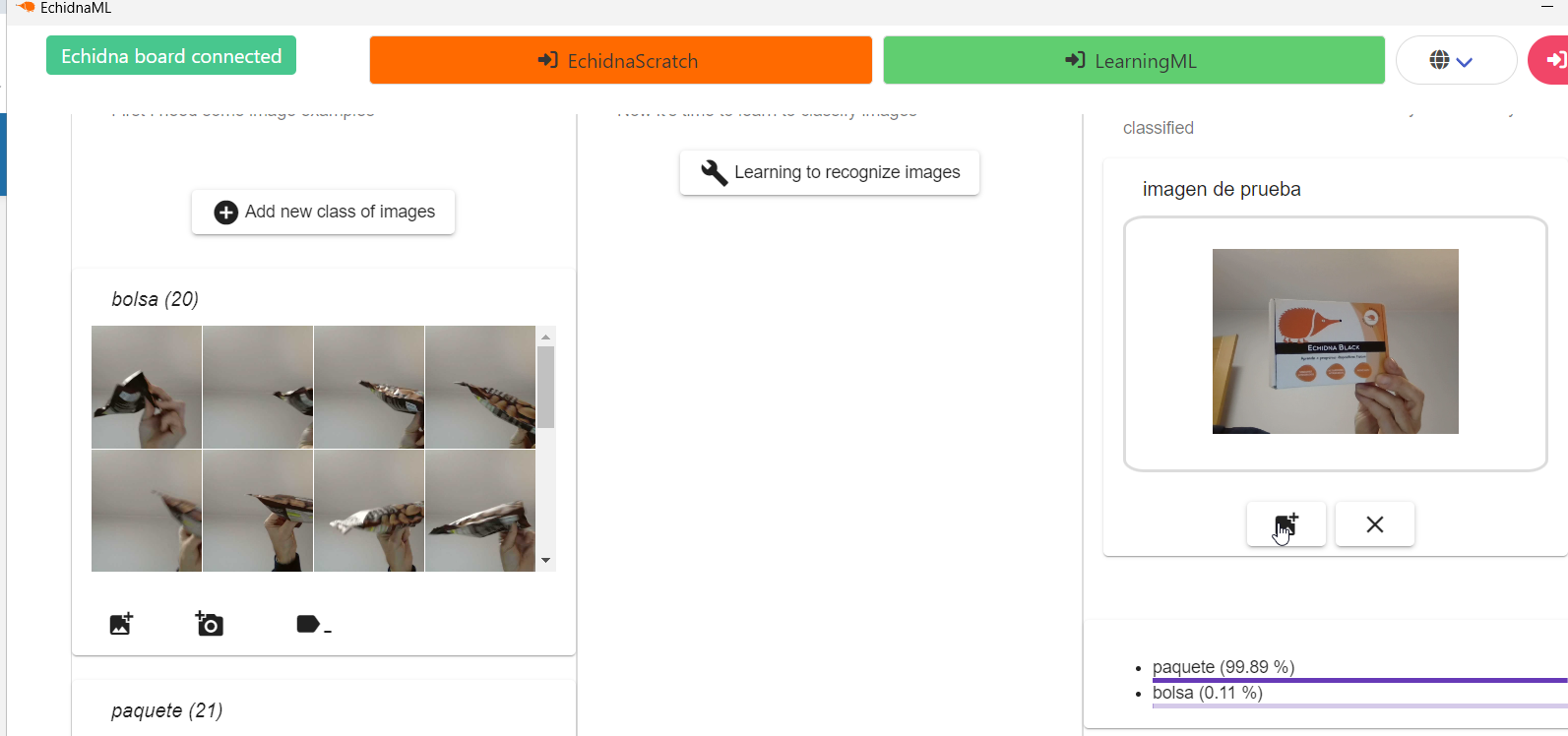](https://libros.catedu.es/uploads/images/gallery/2024-12/2024-12-09-20-38-50-echidnaml.png) ##### **Ecihdna Scratch** Ponemos este sencillo programa utilizando intrucciones de la máquina de IA creada: [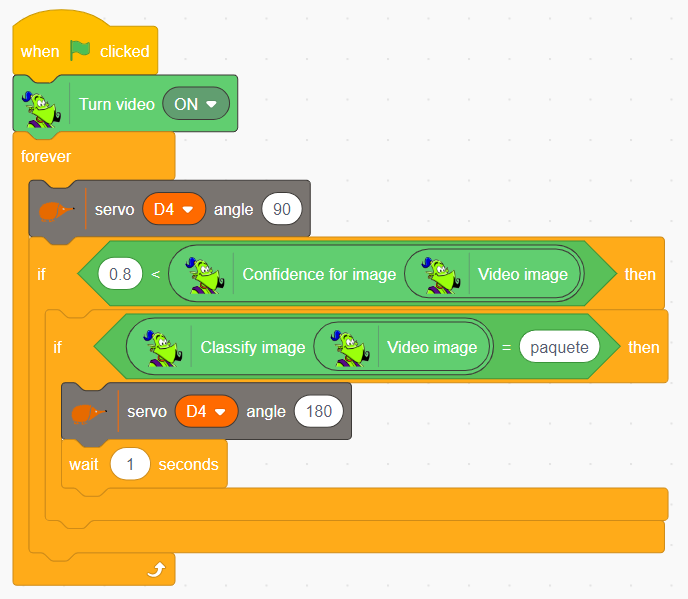](https://libros.catedu.es/uploads/images/gallery/2024-12/2024-12-09-20-49-34-echidnaml.png) ##### **Resultado** Todos los programas de este curso se encuentran en este repositorio: [https://github.com/JavierQuintana/Echidna](https://github.com/JavierQuintana/Echidna) ##### **No te quedes aquí, avanza !!!** Puedes hacer muchos, por ejemplo este que con inteligencia artificial, detecta si es un pájarlo y el espantapájaros se mueve ¿Te atreves a hacerlo? [https://x.com/lobo\_tic/status/1858999814916370902](https://x.com/lobo_tic/status/1858999814916370902) > Espantapájaros 🐦🧹controlado por IA con 🦔[@EchidnaSTEAM](https://twitter.com/EchidnaSTEAM?ref_src=twsrc%5Etfw) en el stand de la gente maja de [@MICROLOG\_TECNO](https://twitter.com/MICROLOG_TECNO?ref_src=twsrc%5Etfw) en [@SIMOEDU\_](https://twitter.com/SIMOEDU_?ref_src=twsrc%5Etfw) 😍 [pic.twitter.com/7O1fIH2xXB](https://t.co/7O1fIH2xXB) > > — Jorge Lobo (@lobo\_tic) [November 19, 2024](https://twitter.com/lobo_tic/status/1858999814916370902?ref_src=twsrc%5Etfw)Hemos explicado 16 montajes, ya con esto tienes roto el hielo para desarrollar proyectos con Edhidna
##### **Proyecto maqueta domótica con servo de motor contínua y led**Este proyecto está obtenido de [https://echidna.es/2021/05/asistente-virtual-robotica-e-ia/](https://echidna.es/2021/05/asistente-virtual-robotica-e-ia/) licencia CC-BY-SA por Jorge Lobo 29 mayo, 2021
A continuación se propone una actividad que consiste en hacer una pequeña maqueta de una estancia y añadir una luz (un LED externo) y un ventilador (un servomotor de rotación continua) controlados desde el ordenador mediante un proceso de Inteligencia artificial. **CONSTRUYENDO LA MAQUETA** **EL PROYECTO** **VÍDEOS** **ARCHIVOS** - [Entrenamiento](https://github.com/lobotic/Proyectitos/blob/master/Echidna/AsistenteVirtual/Asistente) - [Proyecto sb3](https://github.com/lobotic/Proyectitos/blob/master/Echidna/AsistenteVirtual/Asistente1.sb3)El anterior proyecto está obtenido de [https://echidna.es/2021/05/asistente-virtual-robotica-e-ia/](https://echidna.es/2021/05/asistente-virtual-robotica-e-ia/) licencia CC-BY-SA por Jorge Lobo 29 mayo, 2021
Más proyectos en [https://echidna.es/recursos/proyectos/](https://echidna.es/recursos/proyectos/) [](https://libros.catedu.es/uploads/images/gallery/2024-12/2024-12-10-14-07-59.png)