# Por último comunicación Arduino-Arduino
Podemos conectar dos placas Arduino de distintas maneras: Bluetooth, Xbee, Ethernet, WIFI... Pero la forma más sencilla es aprovechar la conexión para la comunicación serie que ya posee Arduino.
##### **Conocimiento previo**
- Programación básica de Arduino.
- Bucles **for,** sentencias if-else, switch-case.
##### **Objetivos**
- Comunicación serie.
- Configuración maestro / esclavo.
- Crear un nuevo puerto serie.
Lista de materiales:
- 2 placas Arduino.
SI NO DISPONES DE DOS PLACAS DE ARDUINO, **TE PROPONEMOS SIMULARLO**
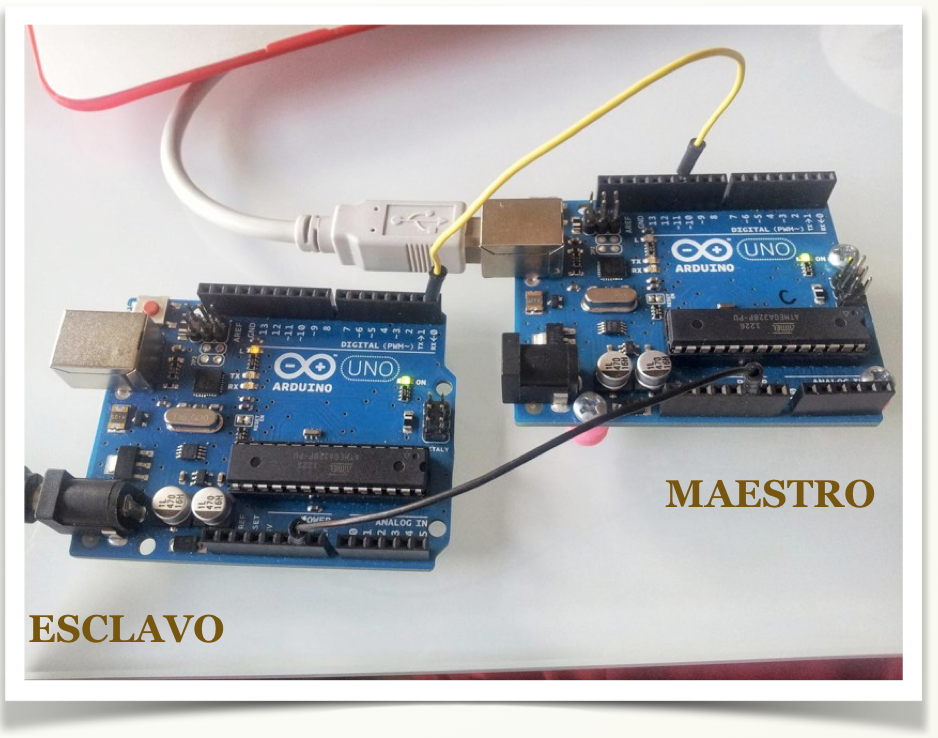
##### **Montaje 24: Conectar dos Arduinos**
El proceso es parecido al bluetooth. Aquí queremos que una Arduino envíe (MAESTRO) y que otra reciba (ESCLAVO), así que cada una correrá un programa distinto.
Podemos hacer también que ambas tarjetas envíen y reciban datos, para ello, la modificación sobre lo que expongo aquí serían muy sencillas, (básicamente copiar y pegar los trozos de código intercambiados).
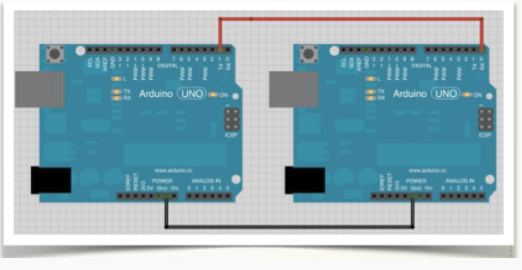
**Conexiones:**
Usaremos los pines estándar de comunicación serie de Arduino:
- 0 : RX (pin por el que RECIBE los datos serie)
- 1 : TX (pin por el que ENVÍA los datos serie)
Para comunicación en 2 direcciones: los 2 pueden enviar / recibir. Las conexiones TX/RX se intercambian (lo que uno envía -TX- tiene que entrar en el otro -RX-). Cualquiera de las 2 puede ser Maestro o Esclavo. **IMPORTANTE**: Conectar ambas GND de las placas.

En el siguiente ejemplo , el maestro, cada 3 segundos envía un carácter al esclavo.
- Si envía una "r", el esclavo hará parpadear su led (d13) rápido.
- Si envía una "l", el esclavo hará parpadear su led (d13) lento.
El programa para el Arduino MAESTRO es:
[https://create.arduino.cc/editor/javierquintana/4e485b39-a075-416c-a951-4c7caa4edcc0/preview](https://create.arduino.cc/editor/javierquintana/4e485b39-a075-416c-a951-4c7caa4edcc0/preview)
El programa para el Arduino ESCLAVO es:
[https://create.arduino.cc/editor/javierquintana/605a2867-7265-4e29-8253-d311696dbe05/preview](https://create.arduino.cc/editor/javierquintana/605a2867-7265-4e29-8253-d311696dbe05/preview)
#### **Si no tienes dos ARDUINOS**
Puedes hacerlo con una simulación en [https://www.tinkercad.com](https://www.tinkercad.com) en nuestro caso este fue el resultado:
Lo tienes aquí [https://www.tinkercad.com/things/dMPodSrbw0n-comunicacion-maestro-esclavo/editel?sharecode=FKrzh6UQa4CZ2UL4ma2WfTuJ3aIRTXRyNJtCWJAAvww](https://www.tinkercad.com/things/dMPodSrbw0n-comunicacion-maestro-esclavo/editel?sharecode=FKrzh6UQa4CZ2UL4ma2WfTuJ3aIRTXRyNJtCWJAAvww)
Y además lo puedes embeber en tu blog, página web... por ejemplo lo tienes aquí, ¡¡pincha en simulación!!
Si n lo ves claro, pincha en el vídeo
#### **Si tienes dos ARDUINOS**
Pues a disfrutar de tu "Red particular" :
## **Otras conexiones**
Si quieres conectar dos Arduinos por comunicación I2C [visita esta página.](https://dronebotworkshop.com/i2c-arduino-arduino/)
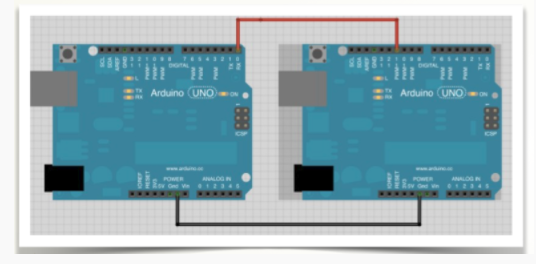
Para la comunicación **en una dirección**:
*maestro(izquierda) -> esclavo(derecha)* sólo necesitamos 1 conexión:
NOTA:
Ocurre que esos pines también los usa para comunicarse por USB cuando está conectado al ordenador, de manera que si queremos tener ambas conexiones (USB/trasmisión serie) deberemos crear una nueva conexión serie (en una conexión software). Sólo podemos conectar 2 Arduinos pues sólo hay un puerto de serie en cada uno de ellos. Aunque la conexión es en un sentido, es necesario conectar los dos cables TX-RX y RX-TX
En este ejemplo, una de las Arduino la vamos a tener conectada al PC, por tanto, en el MAESTRO vamos a crear la conexión software serie sobre los pines 10(RX), 11(TX).
Lo puedes comprobar en la siguiente imagen:
El programa sería el siguiente en el maestro
```
///// MAESTRO
int i=0;
//CREAMOS UN NUEVO PUERTO SERIE (RX, TX)
SoftwareSerial Serie2(10,11);
void setup()
{ pinMode(13,OUTPUT);
Serial.begin(9600); //Inicializa puerto estándar
Serie2.begin(9600); //Inicializa nuevo puerto
digitalWrite(13,LOW);
}
void loop()
{ Serie2.write("r");
delay(3000);
Serie2.write("l");
delay(3000);
}
```
Y en el esclavo sería el siguiente código :
```
////////////////////esclavo
void setup()
{ pinMode(13,OUTPUT);
Serial.begin(9600);
}
void loop()
{ while (Serial.available())
{
//Guardamos en la variable dato el valor leido
char dato= Serial.read();
//Comprobamos el dato
switch(dato)
{//Si recibimos una 'r' ...
case 'r':
{for(int i=0; i<20 i++)
digitalWrite(13,HIGH);
delay(80);
digitalWrite(13,LOW);
delay(80);}
break;
}
case 'l':
{for(int i=0; i<10 i++)
digitalWrite(13,HIGH);
delay(200);
digitalWrite(13,LOW);
delay(200);}
break;
}}}}
```