No es un sensor muy preciso. Si el obstáculo presenta caras oblicuas ya falla en la lectura del eco. Pero por el precio que tiene y la sensibilidad, no esta mal para utilizarla en la robótica educativa.
El sensor tiene 2 partes como puedes ver en la figura. Una se encarga de enviar un sonido (a una frecuencia alta que no podemos escuchar), y la otra parte detecta cuando ese sonido vuelve. Este sensor es muy útil en robots móviles para diversas acciones como no chocar o mantenerse a cierta distancia de una pared. El sensor HC-SR04 que usamos en estos ejemplos tiene 4 pines que corresponden (de izquierda a derecha): - GND , Vcc (a +5V) - Trig: es el que emite el ultrasonido - Echo: Es el que recibe el rebote (Algunos modelos solo tienen 3 pines -HCSR05- indicándonos por el tercer pin ya directamente un valor proporcional con la distancia.)**No aconsejamos usar la Shield de Edubasica, sino conectar diréctamente**, en este caso no nos supone un ahorro de cableado, no como en los motores, leds, ldr, etc...:
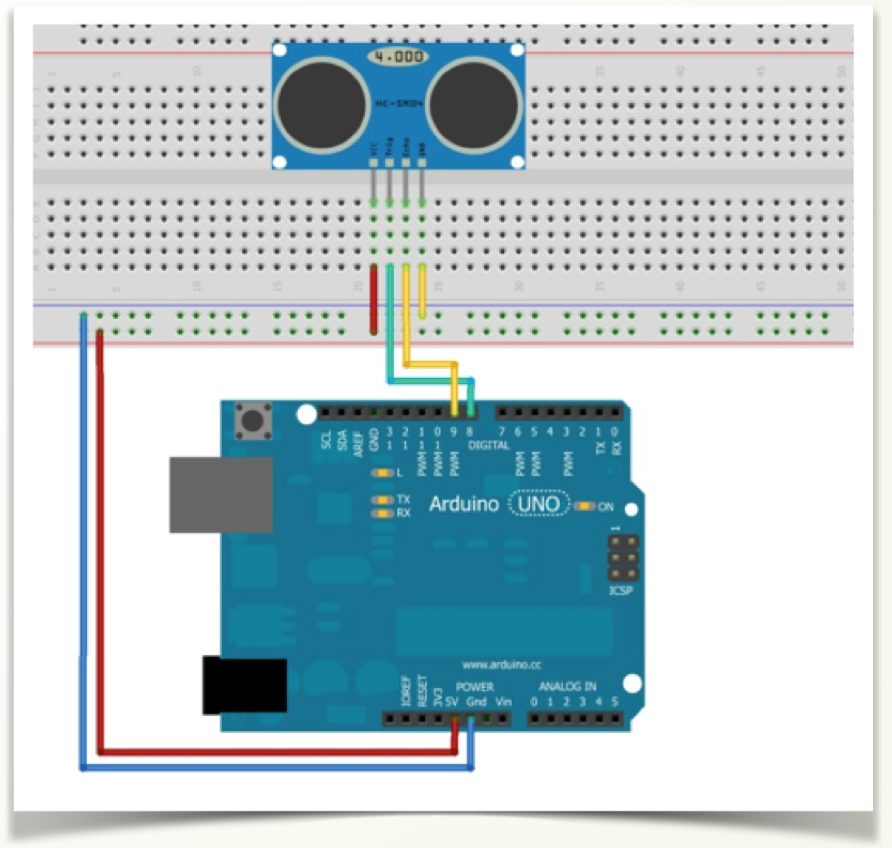 El programa es: [https://create.arduino.cc/editor/javierquintana/e3bac5c7-0bf1-49d9-b267-94b628e04f2e/preview](https://create.arduino.cc/editor/javierquintana/e3bac5c7-0bf1-49d9-b267-94b628e04f2e/preview) El resultado : #### **Montaje 14 Visualización distancia en el LCD** Vamos a repetir el anterior programa pero que lo visualice el LCD ##### **Montaje 14 Conexión:** Conectar el sensor de Ultrasonidos 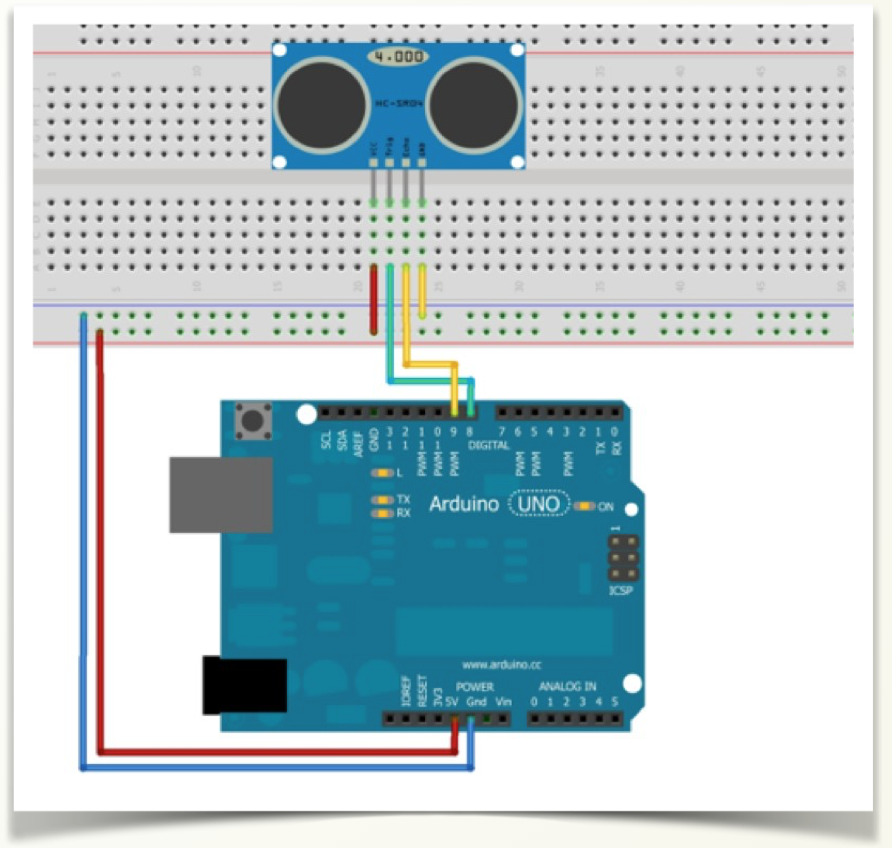 Y el LCD  ##### **Montaje 14 programa** [https://create.arduino.cc/editor/javierquintana/60770327-de2a-41d0-ac11-ddcddb1da0c9/preview](https://create.arduino.cc/editor/javierquintana/60770327-de2a-41d0-ac11-ddcddb1da0c9/preview)