COMPONENTES | Arduino UNO [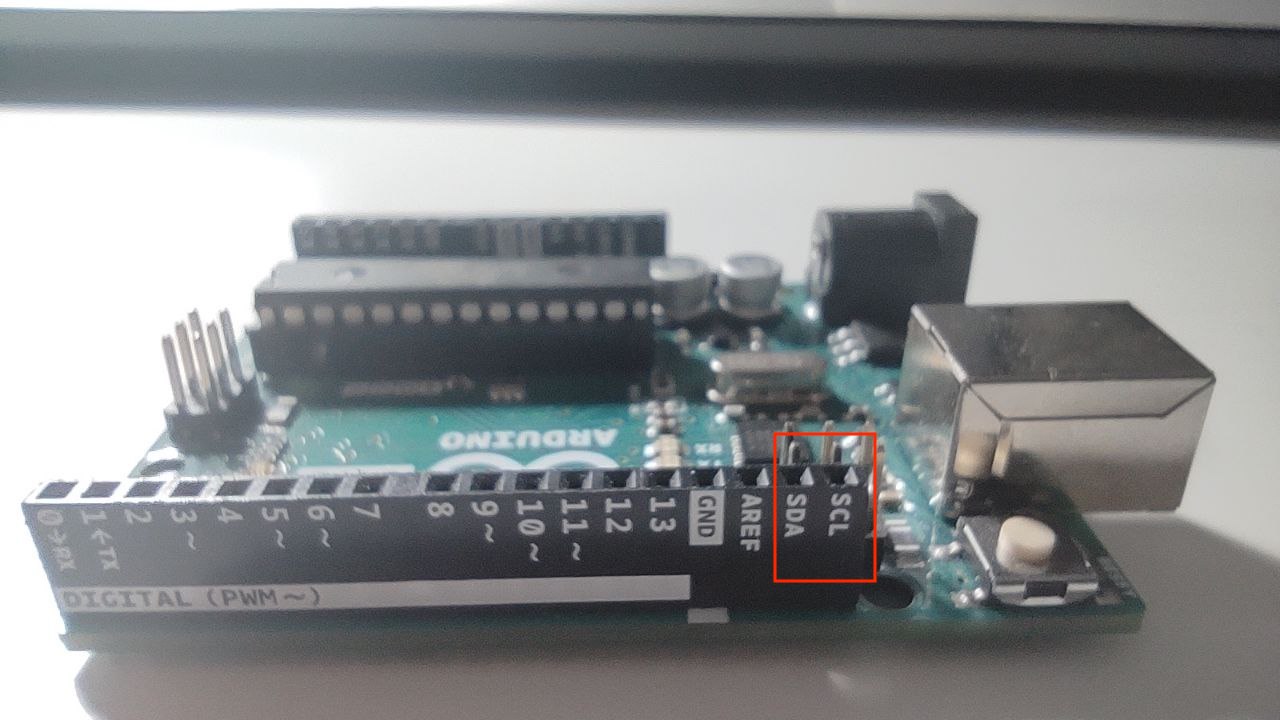](https://libros.catedu.es/uploads/images/gallery/2022-11/image-1668252879858.jpg) |
Sensor de Ultrasonidos [](https://libros.catedu.es/uploads/images/gallery/2022-11/ultrasonido.png) | |
Tira leds NeoPixel [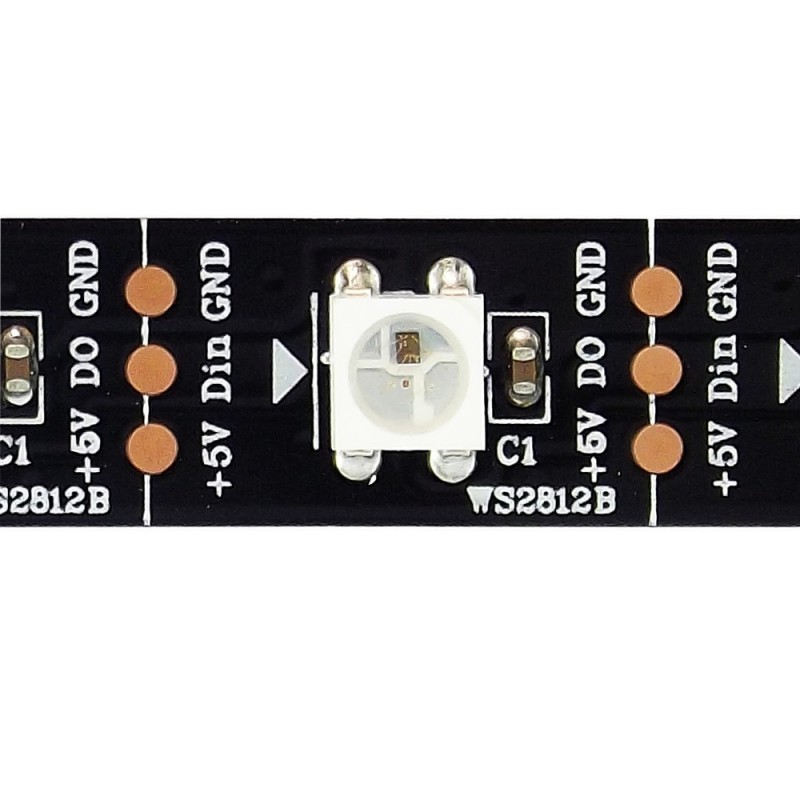](https://libros.catedu.es/uploads/images/gallery/2022-11/zoomneopixel.jpg) | |
ServoMotor [](https://libros.catedu.es/uploads/images/gallery/2022-11/servocurso.jpg) |
Puedes encontrar un tutorial para crear tus diseños con EasyEDA pinchando [aquí](https://libros.catedu.es/link/7618#bkmrk-page-title "EasyEda").
En este caso, como indicaba al principio, vamos a implementar únicamente el diseño de las conexiones del servomotor. El resto del diseño forma parte de la tarea evaluable de este curso. Los servomotores tienen 3 Pines. Positivo, Gnd y datos. A continuación muestro el servo que he utilizado y como quedan las conexiones. [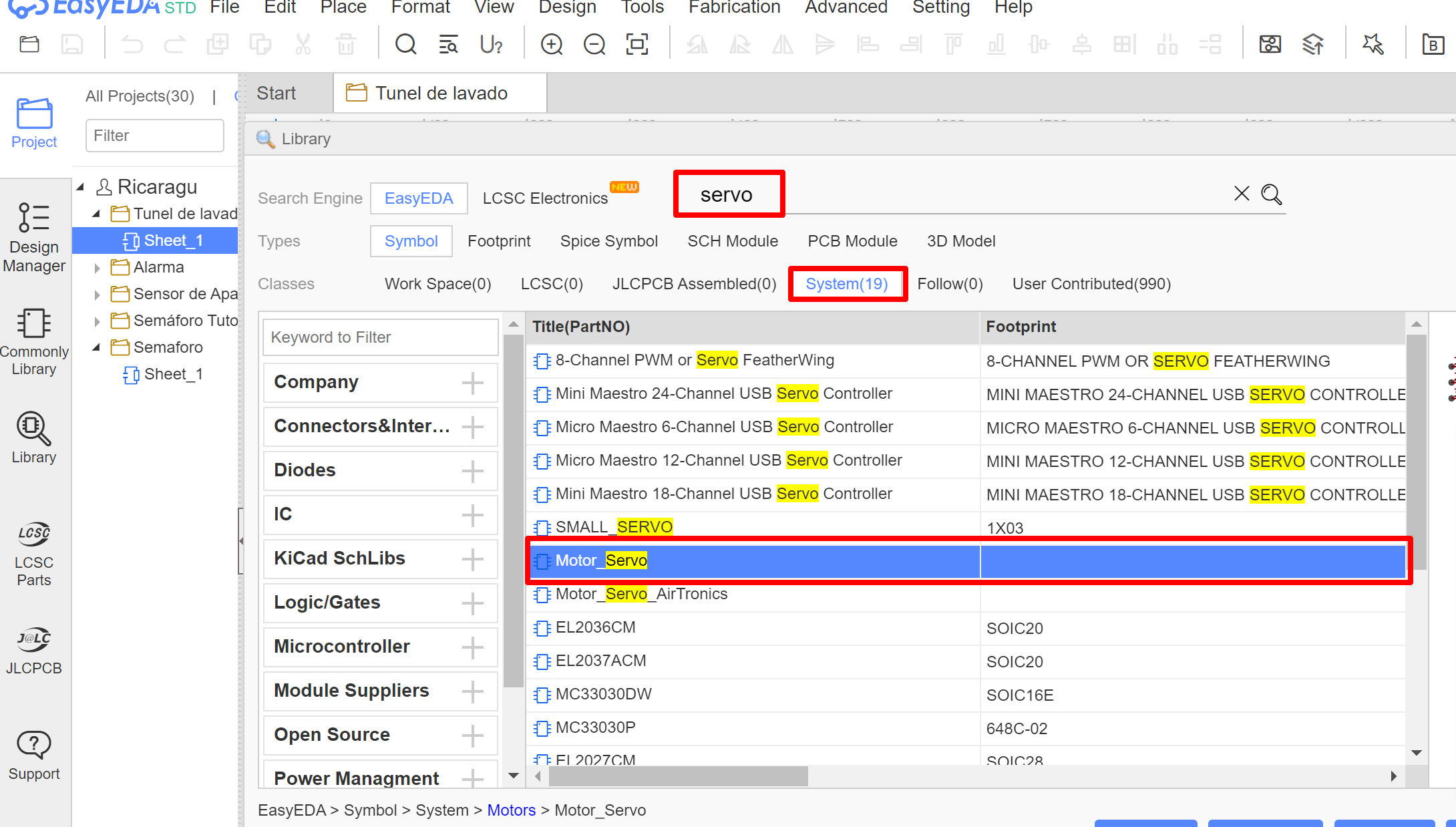](https://libros.catedu.es/uploads/images/gallery/2022-11/easyedastandard-a-simple-and-powerful-electronic-circuit-design-tool-10.png) [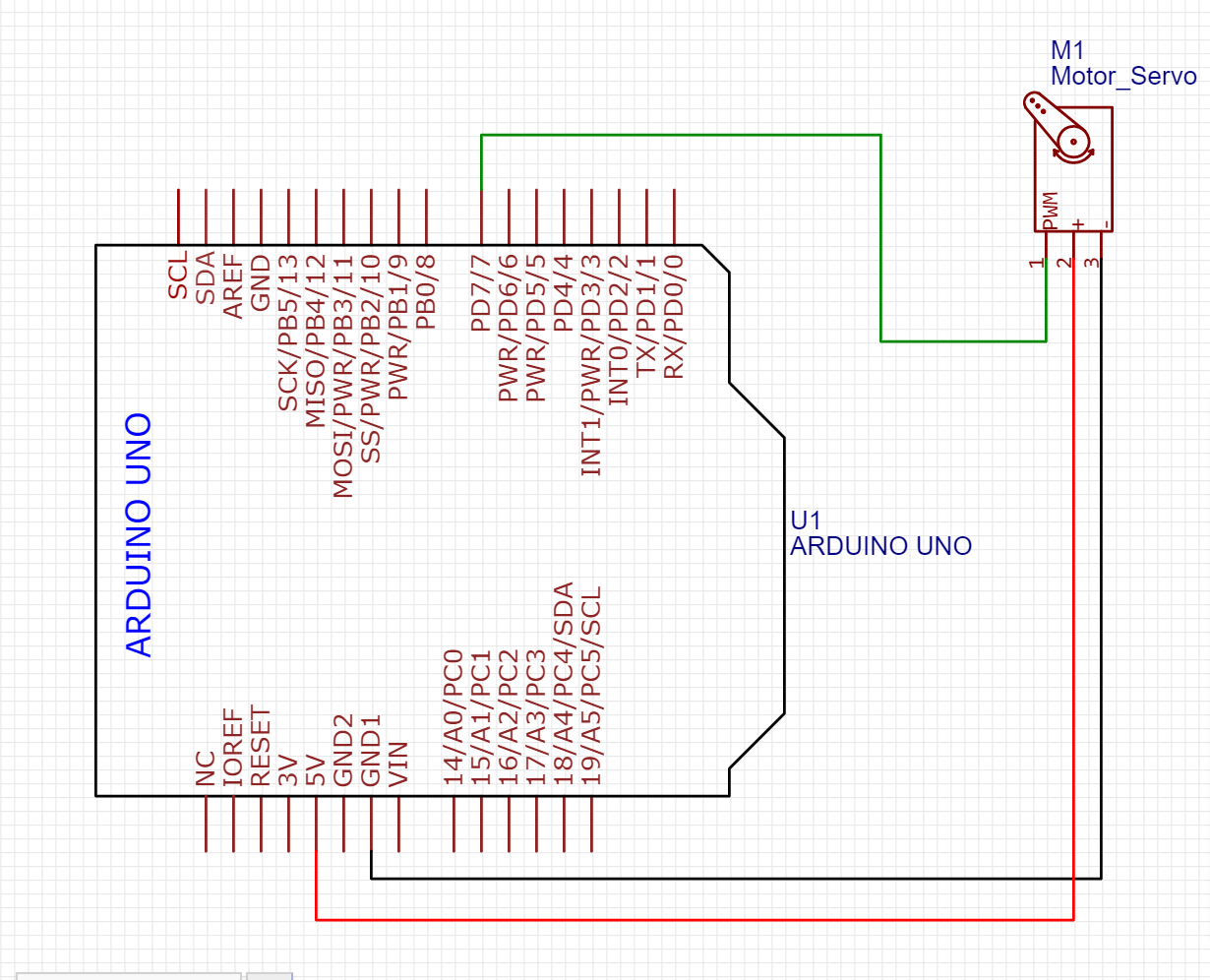](https://libros.catedu.es/uploads/images/gallery/2022-11/easyedastandard-a-simple-and-powerful-electronic-circuit-design-tool-11.png)